基于SolidWorks和ADAMS的注塑机械手运动学仿真
2013-08-31蔡汉明刘承昆
蔡汉明,管 洋,刘承昆
(青岛科技大学 机电工程学院,山东 青岛266061)
虚拟样机技术(VPT,virtual prototyping technology),是指在产品研发过程中,将产品的零件设计与分析结合在一起,在计算机中搭建产品的仿真模型,并针对产品真正投入使用后的各种工作情况进行仿真分析,预测产品的整体性能,进而改进产品整体设计,提高产品性能的技术。使用虚拟样机技术可以大大缩减产品的研发周期,同时保证产品品质。
注塑机械手是一种安装在注塑机上,实现注塑件取放的一种自动化设备。其是一种直线型的机械手,其手部的运动速度、加速度是对机械手进行速度控制的重要参数。速度和加速度是否合适很大程度上决定了机械手运行的稳定性。本文使用SolidWorks和ADAMS软件对机械手进行建模及运动学仿真,绘制机械手的运动曲线,为优化其速度和加速度提供基础依据。
1 注塑机械手建模及装配
ADAMS软件提供了建立三维实体模型的建模模块,但对于创建较复杂的系统仍存在一定局限性。由于注塑机械手模型相对来说比较复杂,为了提高设计仿真的效率,选择在SolidWorks软件中建立机械手的三维实体模型,再将模型导入到ADAMS中进行仿真。在Solid Works中完成建模及装配后的机械手如图1所示。

图1 在Solid Works中建立的机械手模型
2 基于ADAMS的仿真模型的搭建
2.1 Solid Works中模型的简化及导入ADAMS
为了减少仿真软件的计算量而又不影响模型的准确性,在仿真建模过程中,对机械手装配体做出适当简化,将一些对仿真结果影响不大的部件省略。简化后的机械手模型由安装座、底座、横梁、悬臂、主(副)臂固定节、主(副)臂活动节、横行及引拔方向的滑座、上下行滑座、主副手及相应的导轨和滑块等48个零件装配而成。同时为了更加直观的在实时仿真过程中观察机械手主手末端手爪中心的位置,特将主手末端建立成圆锥状,其长度、相对活动节坐标系的笛卡尔空间位置没有变化,其锥尖即为手部中心的位置。
导入后在设置菜单中设置模型的单位为MMKS单位制,即毫米、千克和秒;设置重力为Y轴的负方向,大小为-9.806。从而完成机械手模型的导入。导入后的机械手模型如图2所示。

图2 导入到ADAMS后的机械手简化模型
2.2 ADAMS中构件属性的定义
模型导入以后首先需要定义每一个构件的材料。选择Build→Materials→New输入添加材料的名称、弹性模量、泊松比和密度,就可以生成新的材料。材料的属性如表1所示。在模型中,机械手安装座、底座、横梁等支撑结构一律设置成Q235A,以符合强度要求;导轨和各个滑块设置成Q235A型钢,以减小滑动时的摩擦;主臂和副臂的型材设定为AL6061。

表1 机械手材料属性
2.3 运动副和驱动的定义
由于Solid Works和ADAMS没有专用的数据接口,所以在Solid Works模型中添加的配合关系在ADAMS中是无效的。将模型导入到ADAMS以后需要重新添加运动副。在导入的模型中,滑块和导轨之间都添加移动副,其余构件添加固定副彼此固定,机械手安装座需要和大地之间添加固定副。当全部运动副添加完以后的模型如图3所示。
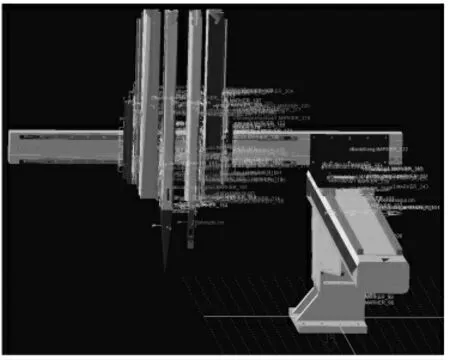
图3 添加约束和运动副后的机械手模型
在ADAMS中,运动可以是与时间有关的位移、速度和加速度函数,也可以定义为常数。根据机械手拿取工件运动的特点,选择使用STEP阶跃函数来定义机械手的动作。STEP函数的格式如下:

其中,
X 为阶跃函数的自变量,在这里取时间,time;
X0为阶跃函数自变量的初始值,s;
H0为阶跃函数的函数初始值,mm;
X1为阶跃函数自变量的最终值,s;
H1为阶跃函数的函数最终值,mm。
根据仿真运动的距离和各个方向的运动速度编写驱动函数,如表2所示。在模型对应的运动副上添加驱动,同时在Function(time)编辑框中输入对应的驱动函数。
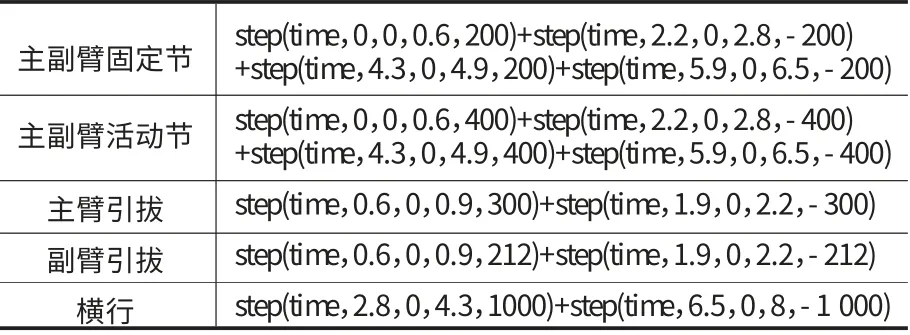
表2 机械手各部分仿真函数表
3 机械手运动仿真和结果曲线
本次仿真中定义总体仿真时间为8 s,仿真总步数为800步。在主工具箱中选择仿真工具按钮,设置参数:End Time=8,Steps=800,点击开始仿真按钮进行仿真。利用ADAMS/postprocessor模块得到机械手末端点的位移、速度曲线如图4~图7所示。

图4 主臂横行方向位置、速度及加速度曲线

图5 主臂上下方向的位移、速度加速度图线

图6 主臂引拔方向的位移与速度图线

图7 副臂引拔方向的位移与速度图线
4 结束语
本文对注塑机机械手进行了模拟仿真,通过在Solid Works中完成零件的三维造型和装配,再将模型导入ADAMS中仿真,克服了ADAMS三维造型能力差的缺点。在ADAMS环境中能很好地对机械手进行运动学、动力学等方面的分析,观察其工作姿态,判断其运动方案的合理性,为机械手的控制打下基础。此外,虚拟样机技术同样可应用到工程机械、航天航空业、国防工业及机械制造业等众多相关领域,能大大缩短产品开发周期,减少开发费用和成本,提高产品品质。
[1]谭志飞,黄辉先.基于Pro/E和ADAMS的机械手运动学仿真[J].机械工程师,2007(4):129-130.
[2]郑 凯.ADAMS 2005机械设计高级应用实例[M].北京:机械工业出版社,2006.
[3]郑建荣.ADAMS—虚拟样机技术入门与提高[M].北京:机械工业出版社,2001.
[4]蔡自兴.机器人学[M].北京:清华大学出版社,2000.