基于TDLAS的管道泄漏检测载机飞行路径规划
2013-07-07刘海芳钟诗胜
刘海芳,王 瑞,钟诗胜
(1.哈尔滨工业大学机电工程学院,黑龙江哈尔滨 150001;2.哈尔滨工业大学船舶工程学院,山东威海 264209)
基于TDLAS的管道泄漏检测载机飞行路径规划
刘海芳1,2,王 瑞2,钟诗胜1
(1.哈尔滨工业大学机电工程学院,黑龙江哈尔滨 150001;2.哈尔滨工业大学船舶工程学院,山东威海 264209)
从检测仪的检测灵敏度和检测激光对管道自主定位时保证检测管道不漏检两方面对载机的飞行路径进行规划。确定在两管段接头处载机的具体飞行方位。基于检测仪的检测灵敏度得到载机的可飞行高度与偏离管道距离的关系。结果表明:考虑实际检测时各因素的影响,建议载机飞行时偏离管线的距离应在45 m之内,飞行高度应低于110 m,且在保证飞行安全的前提下尽量降低飞行高度。
检测灵敏度;飞行范围;扫描方式;飞行方位
基于TDLAS的机载激光对埋地长输天然气管道进行泄漏检测,国外已进行理论研究并进行了飞行试验,取得良好效果[1];国内也已开展基于可调谐激光吸收光谱的大气甲烷监测仪的研究[2-3]。潘明忠等[4]从探测灵敏度、动态探测能力、激光稳频、系统定标、复杂地表反射等方面对机载平台的实用性进行了论证。李克等[5]证明直升机携带激光甲烷检测仪进行长输管线巡检的方法可适用于平原、沙漠、戈壁等地区,而对地形起伏较大的丘陵、山地等地区效果不佳。采用机载激光对管道泄漏进行检测,不漏检是前提,同时要保证检测仪到管道的距离在仪器的检测范围内,在机载泄露检测中载机的位置对泄漏检测的准确性至关重要。笔者从检测仪的探测灵敏度和保证检测激光对管道不漏检两方面对载机的飞行路径规划问题进行研究。
1 载机飞行范围
天然气管道若发生泄漏,在泄漏点周围就会形成一个泄漏气团,李又绿[6]、王大庆[7]等研究了天然气管道泄漏气体扩散模型,并对危险区域进行了估计。李克等[5]论述了基于TDLAS的泄漏检测仪技术原理,利用锁相放大技术得到接收信号中的一次谐波分量P1f和二次谐波分量P2f。由于采用了频率调制技术及二次谐波探测技术,在较小的光学吸收下,二次谐波信号P2f较一次谐波信号P1f小很多[8]。因此,最小可探测的气体含量与最小可探测的P2f是对应的,而最小可探测的P2f是和激光的散射噪声和系统的光电转换噪声相关的,因此光电转换器的噪声和激光器的强度调制噪声将成为影响本系统最小可探测浓度的主要因素。文献[8]中给出了基于理论计算来决定最小可探测的甲烷浓度,其中引入一些假定性的技术参数,使分析结果可靠性降低,其后的实验也证明了这一点。
潘明忠等[4]从工程可行性角度,基于国外已经产品化的手持式探测仪器的技术参数和性能指标来论证机载平台的适用性;但在论证时没有考虑到机载检测的实际情况与手持式检测仪的不同,即采用手持式检测仪进行泄漏检测时,接收透镜正对着反射体,因此接收面积就是透镜的面积,接收透镜与检测区域的距离就是可检测距离;实际载机携带激光检测仪进行泄漏检测时,载机不可能总是在管道正上方飞行,机载检测时接收透镜的有效面积和检测激光的实际路径与接收透镜的实际大小、载机高度之间是有差别的,因此文献[4]的论证结果存在一定误差。本文采用文献[4]的方案,以目前国内已研发成功的手持式泄漏检测仪为基准,计算在研的机载泄漏检测仪的可检测范围,从而确定载机的可飞行范围。
国内的手提式泄漏检测仪采用的DFB激光器波长为1.653 μm,输出功率为10 mW,探测器为In-GaAs PIN photodiode,接收望远镜口径为100 mm,可探测距离34 m;目前在研的机载探测系统相对于手持式产品只是激光器输出功率和接收望远镜的口径做了适当调整(其他参数相同),接收望远镜口径为300 mm,输出功率为15 mW。设计的机载泄漏检测仪要达到和手持式泄漏检测仪相同的探测灵敏度,即

式中,S1、R1、P1和S2、R2、P2分别为手持式泄漏检测仪和在研机载泄漏检测仪的接收透镜的有效接收面积、检测仪和目标的距离以及泄漏检测仪的激光功率。
图1为机载检测时载机与检测管道位置示意图。
设实际飞行时载机离地面的高度为H,载机偏离管道的距离为d,则式(1)将修正为
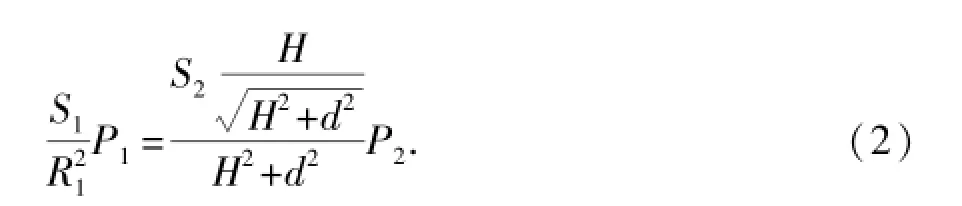
由式(2)推算出要达到与手持式检测仪相同的检测灵敏度,载机飞行高度和偏离管线位置的关系如图2所示。由图2可见:在所携带的泄漏检测仪可探测范围内,载机偏离管线距离越小,载机的可飞行高度越高。因此,若实际检测时因地势或其他地面障碍物等的影响载机飞行高度要提高时,必须控制载机飞行偏离管道的距离,使得载机尽量在管线正上方飞行。在现研检测仪的检测精度下,载机的最大飞行高度不能超过125 m,载机偏离管道的距离应控制在75 m之内。
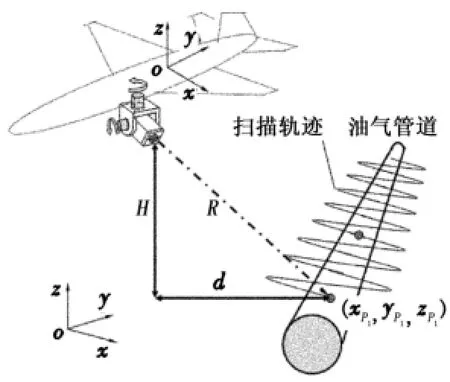
图1 机载检测示意图Fig.1 Schematic diagram of helicopter-borne detection
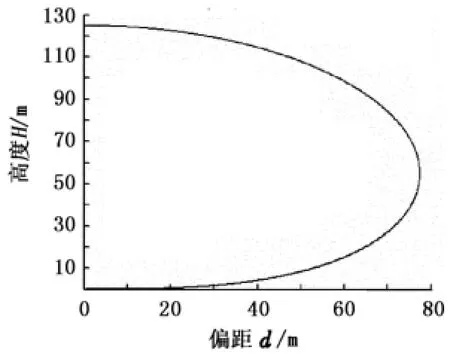
图2 载机飞行高度和偏离管线位置的关系Fig.2 Relationship between flying height and flying deviation from pipeline
考虑实际检测时各因素的影响,保证检测灵敏度,建议载机飞行时偏离管线的距离控制在45 m之内,飞行高度应低于110 m,在保证飞行安全的前提下尽量降低飞行高度,缩小载机偏离管线的距离,保证激光束到管线的距离在检测仪的可检测范围内。
2 载机飞行路径规划
根据机载检测仪的检测灵敏度分析确定了载机的飞行范围,在此范围内还要同时保证载机飞行时检测激光束可以对管线进行全路径扫描,不应出现扫描盲点,否则也可能造成漏检。因此管道上检测点的定位方法及规划飞行路径对于实施准确可靠泄漏检测至关重要。
2.1 检测管线之间位置关系
根据GB50251-2003输气管道工程设计规范,用于改变管头走向的弯头、弯管的曲率半径较大,为此根据管线铺设的方向和位置,将局部管线简化成一段段具有一定宽度的直线段。设S为管线起点位置,E为管线终点位置。下角Lat为纬度,Long为经度,Height为海拔高度。
则管线之间的位置关系见图3(a)。图中,OG、OH分别是两相邻管段的中垂线,其交点为O。规定两管段中垂线交点的一侧称为管道内圈,另一侧称为外圈。
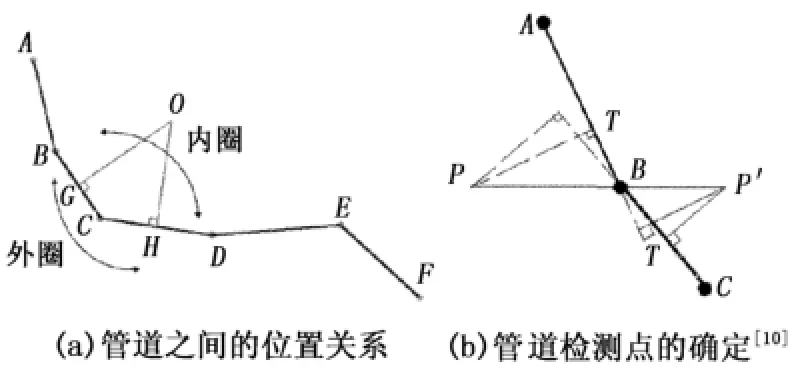
图3 管道之间的位置关系和检测点的确定方式Fig.3 Positions among pipelines and determination of orientation point
2.2 载机所在管网区域判别方法
设P为携带激光检测装置的载机位置。
当管线大体为东西铺设,若满足
PLong∈[min(SLong,ELong),max(SLong,ELong)]时,表明载机已进入当前管线区域,对当前管线进行检测;
当管线大体为南北铺设,若满足
PLat∈[min(SLat,ELat),max(SLat,ELat)]时,表明载机已进入当前管线区域,对当前管线进行检测。
2.3 管线检测点的确定
由激光对管道检测原理可知,反射波光功率与2倍探测距离的平方呈反比关系[5],机载激光对埋地管道的自主定位方法[10]采用检测仪到管线的最短距离确定管道上检测点位置,可大大提高检测灵敏度,但是采用这种定位方法对多条管道连续检测时会造成部分管线漏检。如图3(b)所示,点P、P′分别为载机沿相邻接的两条管线外圈飞行及内圈飞行时载机位于两管线临界位置;T点为激光束在管道上的定位点。若载机沿外圈飞行,采用文献[10]的定位方法,管线AB段中BT段管线漏检;当载机沿内圈飞行时,管线BC段中也有一段管线BT漏检,即载机只要偏离管道,不管怎样飞行总有一段管线漏检,漏检距离为

式中,d为载机偏离管道的距离。

图4 管道上检测点纬度和经度方向定位图Fig.4 Schematic diagram of detection point orientated by longitude scanning and latitude scanning
而两管段连接处又是泄漏检测的重点,显然文献[10]的定位方法在两管段接头处存在漏检隐患。因此必须改变激光束对管道的定位方式。
(1)当铺设的管道在空间上大致呈南北走向,激光只沿纬度方向扫描,如图4(a)所示。
此时管道上扫描点T的坐标为

(2)当铺设的管道在空间上大致呈东西走向,激光只沿经度方向扫描,如图4(b)所示。
此时管道上扫描点的坐标为

载机所在管网区域识别算法及扫描方式判别流程见图5。
按上述载机所在管网区域识别算法和定位方式对检测管段进行扫描,当载机由一段管线进入下一段管线时,若扫描方式不发生改变,无论载机在两管线的内侧、外侧飞行都不会发生漏检;而当扫描方式发生切换时(管线由南北铺设方式变为东西铺设方式或管线由东西铺设转换为南北铺设时),载机必须沿两连接管线的外圈飞行才能保证不漏检。
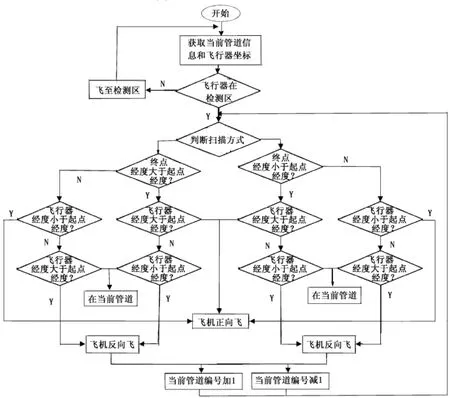
图5 管网区域识别算法流程图Fig.5 Flow diagram of discerning pipelineıs location
3 管道定位点及载机飞行方位仿真
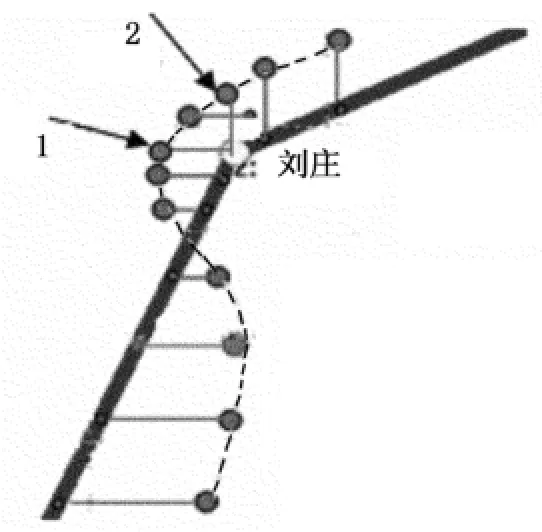
图6 扫描点位置仿真和局部放大图Fig.6 Simulation of scanning points and partial enlarged drawing
将两种不同方向的模拟管道输入上位机软件,载机沿着检测管道偏离一定距离飞行,对管道进行定位,如图6所示。图中虚线为载机飞行路径,虚线上的点为某一时刻载机位置。由图6可见:若扫描方式不发生改变,载机在管线任一侧飞行都不会发生漏检;若扫描方式发生改变,图中载机位于点1时结束对管段沿纬度扫描,载机位于点2开始对下一管段沿经度方向扫描,此时载机位于两管线接头外侧,管道不存在漏检区域,载机位于点1和点2之间时只是对原南北分布管线的延长线进行扫描。仿真结果说明按所述载机飞行位置及定位方式不会造成管道漏检,验证了提出的管道上扫描点定位方式及载机飞行方位的正确性。
4 结 论
(1)机载激光检测管道泄漏,载机的飞行属于精确飞行,考虑实际检测时各因素的影响,保证检测灵敏度,建议在保证飞行安全的前提下尽量降低飞行高度,缩小载机偏离管线的距离。
(2)根据管线的铺设方向在两管段接头处采用沿管线经度扫描或纬度扫描确定管道上检测点位置,否则不管载机怎样飞行都存在漏检的缺陷。
(3)若两管段采用同一种扫描方式,载机在管道两侧飞行均可实现不漏检;但当邻接的两管段发生扫描方式改变时,载机必须沿两管道的外圈飞行才能保证不漏检。
[1] BERERIN A G,MALYUGIN S V,et al.Remote helicopter-borne detector for searching of methane leaks[J]. Spectrochimica Acta Part A:Molecular and Biomolecular Spectroscopy,2007,66(4/5):803-806.
[2] 樊宏,高晓明,鲍健,等.天然气管道泄漏可调谐二极管激光遥感探测的研究[J].光谱学与光谱分析, 2006,26(8):1423-1427.
FAN Hong,GAO Xiao-ming,BAO Jian,et al.Study on remote sensing of methane leakage using a tunable diode laser[J].Spectroscopy and Spectral Analysis,2006,26 (8):1423-1427.
[3] 阚瑞峰,刘文清,张玉钧,等.基于可调谐激光吸收光谱的大气甲烷监测仪[J].光学学报,2006,26(1): 67-70.
KAN Rui-feng,LIU Wen-qing,ZHANG Yu-jun,et al. Infrared absorption spectrometer of monitoring Ambient Methane[J].Acta Optica Sinica,2006,26(1):67-70. [4] 潘明忠,亓洪兴,李正文,等.一种适于直升机平台的天然气管道泄漏监测技术[J].红外与毫米波学报, 2010,29(6):410-414.
PAN Ming-zhong,QI Hong-xing,LI Zheng-wen,et al. Air-borne inspection of natural gas pipeline[J].J Infrared Millim Waves,2010,29(6):410-414.
[5] 李克,李振林,宫敬,等.天然气管道小泄漏高空激光检测试验[J].中国石油大学学报:自然科学版,2010, 34(1):129-133.
LI Ke,LI Zhen-lin,GONG Jing,et al.Detection experiment of small leakage of long distance natural gas transporting pipeline based on airborne laser equipment[J]. Journal of China University of Petroleum(Edition of Natural Science),2010,34(1):129-133.
[6] 李又绿,姚安林,李永杰.天然气管道泄漏扩散模型研究[J].天然气工业,2004,24(8):102-104.
LI You-lü,YAO An-lin,LI Yong-jie.Study on diffusion model of gas pipeline leaking[J].Natural Gas Industry, 2004,24(8):102-104.
[7] 王大庆,高惠临.天然气管线泄漏扩散及危害区域分析[J].天然气工业,2006,26(7):120-122.
WANG Da-qing,GAO Hui-lin.Analysis of the gas leakage and diffusion and its hazardous areas for natural gas pipeline[J].Natural Gas Industry,2006,26(7):120-122.
[8] 尹王保,赵建明,马维光.单激光源谐波遥感探测甲烷研究[J].中国激光,2003,30(10):928-932.
YIN Wang-bao,ZHAO Jian-ming,MA Wei-guang.Research on the remote sensing of methane with harmonic detection employing single laser[J].Chinese Journal of Lasers,2003,30(10):928-932.
[9] ROTHMAN L S,GAMACHE R R,TIPPING R H,et al. The HITRAN molecular database:editions of 1991 and 1992[J].Quant Spectrosc Radiat Transfer,1992,48 (5/6):469-507.
[10] 刘海芳,王瑞,钟诗胜.机载激光对埋地管道的自主定位[J].光学精密工程,2011,19(8):1723-1729.
LIU Hai-fang,WANG Rui,ZHONG Shi-sheng.Helicopter-borne laser autonomous positioning of buried pipeline[J].Opt Precision Eng,2011,19(8):1723-1729.
(编辑 沈玉英)
Path planning of helicopter flight with borne detector based on TDLAS for pipeline leaks detection
LIU Hai-fang1,2,WANG Rui2,ZHONG Shi-sheng1
(1.School of Mechatronics Engineering,Harbin Institute of Technology,Harbin 150001,China;
2.School of Naval Architecture,Harbin Institute of Technology,Weihai 264209,China)
From the detection sensitivity of the detector and the detection laser autonomous positioning the pipeline to ensure the detection pipeline not missed,the path planning of the helicopter was given.The flight range at the joint of two pipe sections of carrier aircraft was determined.Concerning the detection sensitivity,the relationship between the flying height and the distance due to the flying deviation from the pipeline was given.The results show that the flying height is less than 110 m and the flying deviation distance from the pipeline is less than 45 m respecting the detection factors.The flying helight is reduced as far as possible under the premise of flight safety.
detection sensitivity;flying scope;scanning mode;flying direction
TP 394. 1;TH 691.9
A
1673-5005(2013)02-0102-05
10.3969/j.issn.1673-5005.2013.02.017
2012-11-10
国家“863”计划资助项目(2008AA06Z208)
刘海芳(1971-),女,副教授,博士研究生,研究方向为产品数字化设计与制造、故障诊断等。E-mail:moyuzhairen@163.com。