三轴车辆全轮转向系统设计及转向性能分析*
2013-06-28洪升耀徐国英刘西侠陈靖然
洪升耀,徐国英,刘西侠,陈靖然
(装甲兵工程学院 机械工程系,北京100072)
1 引言
多轴轮式车辆车轴多、车身长,导致低速时转向半径相对较大,这制约着多轴轮式车辆尤其是多轴轮式装甲车辆的发展。全轮转向技术是改善车辆转向性能的主要手段之一,也是实现主动安全性的方法之一。全轮转向技术能减小车辆低速转向半径,其应用效果在大型车辆上更加明显[1]。
目前,全轮转向技术在四轮转向上的应用已较为成熟,但多轴车辆全轮转向的研究相对较少。以某6×6前四轮转向的三轴车辆转向系统为基础,提出该车全轮转向系统的改装设计方案,对全轮转向模式(简称为AWS)的转向性能进行仿真分析。
2 全轮转向系统改装设计方案
某6×6前四轮转向车辆转向机构采用液压助力转向系统,前桥和中桥转向机构之间用机械杆系连接,能完成前桥轮胎和中桥轮胎转向角的定比例控制。但想实现符合全轮转向要求的控制策略,应该使前桥和后桥、中桥轮胎转向角之间满足相对更为灵活的控制要求。因此设计能在有限的空间内安装并满足要求的转向系统是问题的关键[2]。
2.1 转向系统方案
为实现多轴轮式车辆的全轮转向,可考虑在现有转向系统的基础上对非转向桥进行改装。目前车辆的转向系统有机械式转向、液压助力转向、电控液压助力转向、电动助力转向和线控转向。对于某6×6前四轮液压助力转向车辆,转向时需提供较大的驱动力,且在车辆原有液压转向系统上增加新的液压回路也比较简单,故采用电控液压式全轮转向系统[3]。
图1为某6×6车辆全轮转向系统布置图,前两桥为机械转向桥,布置转向拉杆,第三桥为非机械转向桥,采用电控液压装置,电控液压助力转向系统由车速传感器、转角传感器、电控单元(ECU)、控制阀、液压缸等组成。

图1 全轮转向结构示意图
2.2 控制策略方案
目前轮式车辆全轮转向系统常用的控制策略有质心零侧偏角比例控制、横摆角速度反馈控制、横摆率状态跟踪控制。鉴于质心零侧偏角控制策略实现较为简单,在低速时能保证车辆的转向灵活性,在高速时能够确保车辆的转向与驾驶员操纵的一致性,因此改装方案的控制策略采用零侧偏角比例控制策略[4]。
如图2所示,当驾驶员转动方向盘时,ECU根据采集到的前轮转角传感器、车速传感器信号,判断车辆的转向状态,计算出其他各桥的理论转角,再向电磁阀发出控制命令,电磁阀操纵转向液压缸驱动车轮实现车辆响应。

图2 零侧偏角比例控制
3 全轮转向模型理论分析
3.1 二自由度单轨模型
由于二自由度单轨模型具有车辆转向时的基本特征,因此为方便分析,可将多轴车辆简化为具有代表性的线性二自由度模型[5-6]。
如图3所示,u和v分别为质心处x和y轴的速度,r为横摆角速度,车轮转向角为δi,质心到各转向轴的距离为li,转向中心到各转向轴的距离为Li,第一轴到各轴的距离为L1i,质心的侧偏角为β。
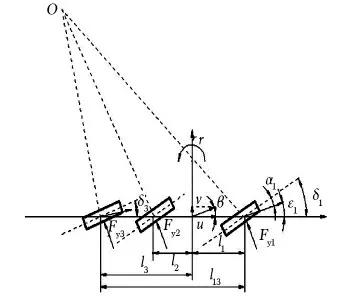
图3 三轴车辆全轮转向二自由度模型
根据汽车动力学,可得状态空间方程[7]:


当车辆处于稳态时,侧向加速度和横摆角速度的一阶导数都为“0”,由式(1)可得车辆稳态运动方程:

运用克莱姆法则,由式(2),可得车辆的侧向速度和横摆角速度:

由于R=u/r,可得车辆转向半径为:

由于车轮转角都很小,为使车辆转向时尽量保持纯滚动,由阿克曼定理可得车轮转角比:

3.2 零侧偏角比例控制
零侧偏角比例控制策略是通过车轮转角比变化来实现车辆的侧向偏转最小,即质心侧偏角为0,由此可知tanβ=v/u=0,即有v=0[8]。
由v=0,可得转向中心到第一轴的距离为:

4 三轴车辆全轮转向性能分析
以6×6车辆为仿真对象,分析三轴车辆全轮转向性能,车辆参数如表1所列。

表1 某型三轴车辆结构特性参数
4.1 转向中心到前轴的距离
以上述三轴车辆为例,选取前轮转角为5°,可得不同车速下稳态圆周行驶时转向中心到车辆第一轴的距离,如图4所示。由图4可知,转向中心不是固结于一点,而是随着车速的增加不断后移,在设计车速内有可能超过车辆底盘最后一桥所在的平面。

图4 转向中心到前轴的距离
4.2 转角比例计算
同样选取前轮转角为5°,可得在不同车速下全轮转向的各轮转角比例变化趋势,如图5所示。

图5 全轮转向转角比例
由图5可知,在低速时,中轴车轮、后轴车轮的转角都与前轴车轮的转角反相,且后轴车轮的转角幅度要大于中轴,在速度未达到60 km/h时,中轴、后轴的车轮已先后变成与前轴同相偏转,且随着速度的提高,前中轴、前后轴的转角比趋于平缓且相近。
4.3 转向半径分析
选取前轮转角为5°,车速为0~40 km/h,可得出车辆低速转向时,前四轮转向(4WS)和全轮转向(AWS)的转向半径对比图,如图6所示。

图6 转向半径对比图
由图6可知,低速时全轮转向(AWS)的转向半径明显比前四轮转向(4WS)的转向半径小,说明采用质心零侧偏角比例控制的AWS相比4WS在低速时能减小车辆的转向半径,提高车辆的机动灵活性。
5 结论
(1)全轮转向的转向中心不是固结于一点的,而是随着车速的提高不断后移。
(2)由于转向中心的不断后移,全轮转向车辆低速转向行驶时进行逆相位操作,而在中高速转向行驶时进行同相位操作。
(3)质心零侧偏角比例控制的AWS相比4WS在低速时能减小车辆的转向半径,提高车辆的机动灵活性。
[1] 袁 磊,刘西侠,金 毅,等.一种具有不同转向模式的多轴转向车辆设计[J].机械设计与制造,2012(10):33-35.
[2] 陈思忠,孟 祥,杨 林,等.三轴车辆多辆转向技术研究[J].北京理工大学学报,2005(8):675-683.
[3] 王 倩,蔺 毅.汽车动力转向系统的发展[J].农业装备与车辆工程,2009(3):45-46.
[4] 李 爽.七轴车辆比例控制转向研究[D].长春:吉林大学,2008.
[5] 余志生.汽车理论[M].北京:机械工业出版社,1990.
[6] 郭孔辉.汽车操纵动力学[M].长春:吉林科学出版社,1991.
[7] 喻 凡,林 逸.汽车动力学[M].北京:机械工业出版社,2008.
[8] Liu Xixia,Yuan Lei,Jin Yi,et al.All-wheel Steering Technology and Its Development Prospects of Wheeled Vehicles[J].2011 International Academic Conference on Numbers Intelligence Manufacturing Technology and Machinery Automation(MAMT 2011),2011(12):256-261.
