应用GPS与测深仪进行无验潮水下地形测量
2012-12-24裴运军
裴运军
(深圳市长勘勘察设计有限公司 深圳市 518003)
传统的水下地形测量方法是在岸边选择通视条件良好的几个控制点,架设经纬仪(2 台交会)或全站仪,实时观测船体上的固定目标点,通过计算获得测量目标点的平面坐标,再利用水面高程与所测水深数据来求得测量点的水底高程。这种测量方法测量精度差、效率低,同时要进行水位测量,而且很难做到平面与高程的同步观测。
随着GPS-RTK 技术的迅速发展,在水下地形测量中使用高精度GPS 定位和数字测深技术成为当今水下地形测量的首选方案。该技术无需测量水面高程,将GPS 与测深仪、电脑等设备联在一起,组成水下地形测量系统,测量时仅需1~2 名操作员,不仅减少了作业员的劳动强度,而且大大提高了工作效率。
1 GPS 差分技术水下地形测量系统组成
组成GPS 水下地形测量系统的主要设备为:2台带实时差分GPS 接收机和1 台数字式测深仪。其中1 台GPS 接收机作为参考站设置在岸上的已知点上,另1 台在测深船上作为流动站,在测深船上将GPS 接收机、数字化测深仪、便携式电脑连接成水下地形测量系统。设备连接如附图。
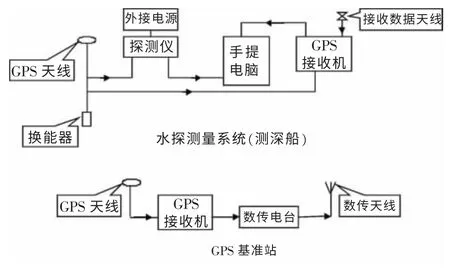
附图 设备连接图
GPS 接收机与测深仪的换能器之间,由一根固定长度的杆件连接在一起,GPS 天线位于测深仪探头正上方,并将两者固定在船的侧面,使GPS 天线与换能器的连接杆垂直于水面,这样可保证测深仪探头与GPS 天线的平面坐标一致。利用测深仪系统的控制装置可使接收机天线与换能器同步工作,即在GPS 接收机测量三维坐标的同时,测深仪也测得其底面以下部分的水深。
作业开始后,当参考站(GPS 基准站)的GPS 接收机接收到五颗以上卫星数据后,立即通过电台将数据链发射给流动站,流动站接收到数据链后,自动解算出自身位置的平面坐标和水面高程,并将以上数据通过计算机串口传输给计算机,同时数字化测深仪把同步测得的水深数据通过计算机另一扩展串口(利用计算机上PCMCIA 插槽插入PCMCIA 卡来扩展)传输给计算机,测量软件根据设定的参数同步记录一个既有测深点的平面坐标和水面高程,又有水深值的数据文件。
2 基本原理
2.1 水下地形点坐标和高程值的获取
GPS RTK 动态测量方法,是以载波相位观测量为根据的实时差分测量技术。载波相位差分测量的定位精度很大程度上依赖于整周模糊度能否在航精确确定。整周模糊度在航解算(OTF)是一种动态环境下的模糊度确定方法,它可省去在精密动态定位中的的静态初始化过程。常规精密定位中复杂的整周跳变问题也因OTF 的引入变得十分简单。载波相位差分测量整周模糊度的确定模型为:

式中 Xk=(dxdydzx y z dn0dn1…dnm)——状态向量;
Φk-1——状态转移矩阵;
Hk,φ——载波相位的测量矩阵;
Rk,φ——载波相位的方差阵;
Qk——系数阵。

由上式计算得到整周模糊度N 后,代入载波相位观测方程,便可以获得厘米级的平面定位精度。
1996年1月,泛海系作为股东之一的民生银行正式成立,成为中国第一家主要由民营企业发起设立的全国性股份制商业银行,注册资金为13.8亿元。
动态测量船上天线的空间坐标由GPS 自动处理,解算后的三维坐标通过串口输出到笔记本电脑中。只要量取GPS 天线相位中心到换能器之间的垂距hG-T以及换能器吃水深度便可得水面的高程Vs,进而获得水底点的高程Vd。设V 为测量的水深,GPS 相位中心的高程为VG,则水底点的高程hd可表达为:

这种方法无须进行水位改正,直接得到同陆地高程基准一致的高程。
2.2 水下地形测量数据采集密度的控制、船体运行轨迹和船速的确定
测深船在工作过程中,笔记本电脑不断从GPS中接收数据,在Trimble GPS 中,其串口的输出信息串中带有GPS 天线的三维坐标和UTC 时间,可以根据信息串中的平面坐标求出与上一点的航行距离D,如果D 小于采集控制密度D 控,则放弃该数据,若D 等于或大于D 控,则笔记本电脑将该点数据进行处理并保存。
将采集的数据点连接起来,并将图形在笔记本电脑上显示,即得到测深船的运行轨迹。
在求出两点的距离后,根据UTC 求出两点间的航行时间T,则测量船的即时船速可按下式求出:
根据测深船在地形图上的运行轨迹和速度,可以对测量船的航行进行控制。
3 系统操作方法
置GPS 接收天线于控制点上,在测站附近架设好电传天线。将量取的GPS 天线高和该控制点的WGS-84 经纬度坐标输入GPS 手薄中并启动GPS主机,再在同一文件下(保证各参数相同)启动GPS流动站并进行初始化处理,待流动站GPS 接收机得到固定解后,用流动站接收天线检测另两个控制点坐标,正确后将GPS 流动站移到测深船上。
打笔记本电脑,启动水下地形测量程序,新建一测量任务,命名为SZH1,将坐标转换参数、探头吃水深度、天线高度、以及数据采集密度输入电子手簿中,随后打开测深线布置图,即可开始观测。随着测量船的前进,笔记本电脑自动将GPS 接收机中的定位数据换算成当地坐标系和高程,笔记本电脑中的船形标志会在屏幕上绘出船体的运行轨迹,将图形放大,可以查看地形点的位置和高程,操作员所要做的是指挥船的运行方向,使测量船的轨迹线与测深线一致。并随时查看电脑中的信息,当GPS 接收机所测卫星信号出现失锁时,电脑会出现“无固定解”的提示信息。此时,需重新初始化。由于数据点的采集实时保存在电脑中,不必担心数据丢失。
每天采集完数据后,将笔记本电脑中存储的数据转移至个人电脑上进行地形图的详细编辑。
4 资料处理
野外测量结束后,在室内对原始数据进行处理,包括水深取样、综合改正输出、剔除因频率漂移出现的异常数据点以及数据合并、格式转换等;按照数字化成图软件要求的格式形成水下地形点数据文件,完成展点、等深线生成、注记等工作,保存图形,并以需要的比例尺输出图形。
5 结 语
与传统的水下测量模式相比,具有以下特点:
(1)用GPS RTK 技术进行水下地形测量省去了水位观测(即无验潮),不存在水位观测误差(潮汐与水流影响)和水位内插误差,提高了水深测量精度。
(2)适用于无验潮站水域,拓宽了其应用范围。
(3)使用一体化测量系统,减少了作业员的劳动强度,提高了作业效率。
(4)测量前必须对控制点进行检测,验证坐标转换参数的正确性;对回声测深仪进行稳定性检验和一致性检验,保证测深结果的正确性。
1 吕继书.GPS 结合测深仪水下地形测量原理与应用[J].天然气与石油,2010,49(4):50-52.
2 梁开龙.水下地形测量[M].北京:测绘出版社,1995.
3 李征航,黄劲松. GPS 测量与数据处理[M].武汉:武汉大学出版社,2005.