一种新型的HESM控制系统设计
2012-11-22黄明明周成虎
黄明明,周成虎
(河南工程学院 电气信息工程系,河南 郑州 451191)
混合励磁同步电机(HESM)是在永磁同步电机(PMSM)和电励磁同步电机的基础上发展起来的,内部包含永磁体磁势和电励磁磁势两个磁势源.永磁体产生的磁势为主磁势,励磁绕组产生的磁势为辅助磁势,所以这种电机既具有永磁同步电机效率高、转矩/质量比大的特点,又具有电励磁同步电机调磁方便、调磁容量大的优点,是一种低速大转矩和宽调速电机,在航空航天、电动汽车等领域具有较大的推广应用价值.
近十年来,国内外专家学者对这类电机理论及本体设计做了大量工作,取得了很多有意义的成果,在权威期刊和国际会议上也不时有涉及混合励磁电机方面的文章出现[1-3].美国威斯康星大学电机专家Lipo教授在混合励磁电机技术方面已经进行了卓有成效的研究,有多项涉及混合励磁电机及其应用的专利公开[4-5].此外,国外某些驱动系统公司还推出了一些相关的混合励磁电机产品,如美国TIMKEN公司研发的盘式车轮转子混合励磁电机驱动系统已在电动汽车驱动领域获得了初步应用.但是,目前对该类电机控制系统的研究相对较少,国内关于HESM控制系统设计的、已公开的发明专利仅有一项[6].陈清泉给出了一种混合励磁无刷直流电机模糊控制方案,通过模糊控制器调节电机的电枢电流与励磁电流大小[7].日本学者Shinnaka提出了一种基于通用坐标系的动态矢量控制模型[8],对隐极HESM提出了一种基于id=0的铜耗最小化矢量控制方法[9].
本研究提出了一种新型的基于矢量控制的HESM控制系统,给出了控制系统的软硬件电路框图,详细介绍了各功能模块的工作原理,最后给出了实验结果,验证了该控制系统的有效性.
1 HESM的控制系统原理
HESM控制系统与普通的PMSM控制系统类似,如果在控制中不使用励磁电流调速,HESM控制系统就等同于普通的PMSM控制系统[10],所以在HESM控制系统的软硬件设计中,可以参考PMSM控制系统.图1为HESM控制系统框图,主要包括4个模块:HESM控制系统主电路、模拟信号处理模块、数字信号处理(DSP)模块与人机通信与显示模块,下面具体介绍这4个模块的功能和原理.
HESM控制系统的主电路结构主要包括两个驱动电路,一个是电枢驱动电路,用来控制HESM电枢绕组的电压和电流,另一个是励磁驱动电路,用来调节励磁电流,根据控制的需要进行增磁调速或弱磁调速.工作原理如下:220 V的交流电接入驱动电路后,首先通过整流桥进行整流,由电容器滤波变为直流电源,然后经过三相逆变电路和单相桥式逆变电路分别控制HESM的电枢绕组和励磁绕组,驱动电机运行.在主电路设计中,有一个过流继电保护电路,这个电路的作用是做主电路上的电保护,即主电路的开关合闸瞬间,由于电容两端的电压不能突变,接近为0,如果此时继电器闭合,将会产生很大的冲击电流,对电路产生不利影响,因此,主电源开关闭合瞬间继电器是断开的,电流通过与继电器并联的限流电阻进入电路板并对电容器充电,随着电容电压的升高,当检测到其值大于基准电压后,继电器闭合,电网电流通过继电器流入驱动板中.
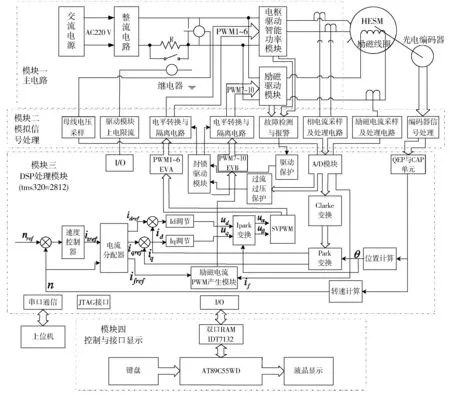
图1 HESM控制系统结构框图
模拟信号处理电路是DSP的外围电路,用于处理各种模拟信号,主要的单元电路结构和功能如下:
(1)编码器信号处理电路
光电编码器与HESM的转子同轴安装,随转子转动时输出2组6路脉冲信号,其中一组脉冲信号是相位相差60电角度的脉冲信号U,V,W,各脉冲宽度为180电角度,这组信号在电机启动时用于转子磁极粗略定位,输入到DSP的CAP单元,CAP单元根据捕捉到的U,V,W值,采用方波控制对应的两相电枢绕组导通,使电机转动.电机在转过小于或等于一周的时间内,会捕捉到一个复位脉冲信号“Z”,捕捉到“Z”信号之后,电机转子的初始位置也就确定了,程序从方波控制模式跳出,进入矢量控制模式.光电编码器还输出另一组脉冲信号A,B,Z,正交编码脉冲信号“A,B”被送入DSP的QEP单元,QEP单元对这两组信号进行计数,计数值传递给转子位置计算单元,实时算出电机转子的准确位置.同时,QEP单元的计数值还传递到转速计算单元,实时计算出电机的转速nr.
(2)母线电压、相电流与励磁电流采样与处理电路
3个霍尔电流传感器和1个霍尔电压传感器分别对相电流、励磁电流及母线电压进行测量,然后分别进行滤波、放大、电压偏置、稳压等处理,最后送入DSP的模拟输入信号引脚.
(3)光电隔离电路
通过光耦隔离控制板的低压器件与驱动板的高压电路,避免主电路的高电压意外引入控制板造成人身或设备的损害.
(4)故障检测与报警
用于在电路或电机出现故障时,如过流、过压以及过热等进行报警和保护.
DSP处理模块采用TI公司的DSP器件TMS320F2812,这款DSP内部包含两个事件管理器,可分别用来控制电枢电流和励磁电流.在DSP内部,不仅需要完成A/D转换、数字滤波及数据校正等功能,还需要做各种算法处理,最后输出2组PWM信号,分别控制电枢与励磁驱动板上的功率管的开关状态.这个模块所包含的主要功能单元如图1所示,包括A/D转换、QEP与CAP单元、位置计算、转速计算、Clarke变换、Park与Ipark变换、速度控制器、电流分配器、d轴与q轴电流PID控制器和SVPWM等.在上述这些功能单元中,与普通PMSM矢量控制系统相比,多了励磁电流PWM产生模块和电流分配器功能单元.励磁电流PWM产生模块输出控制励磁驱动模块的PWM信号,其原理如图2所示.电流分配模块如图3所示,它用来协调电枢电流与励磁电流的分配,以实现电机的稳定、可靠、高效运行.该模块是HESM驱动系统的核心模块,采用速度分区控制的方法调速,低速区和电机启动阶段采用增磁或无励磁运行,可有效提高HESM的启动速度和负载能力;高速区采用励磁电流结合d轴电流弱磁调速,可大大扩展电机的恒功率区,使其获得远高于额定转速的调速能力.
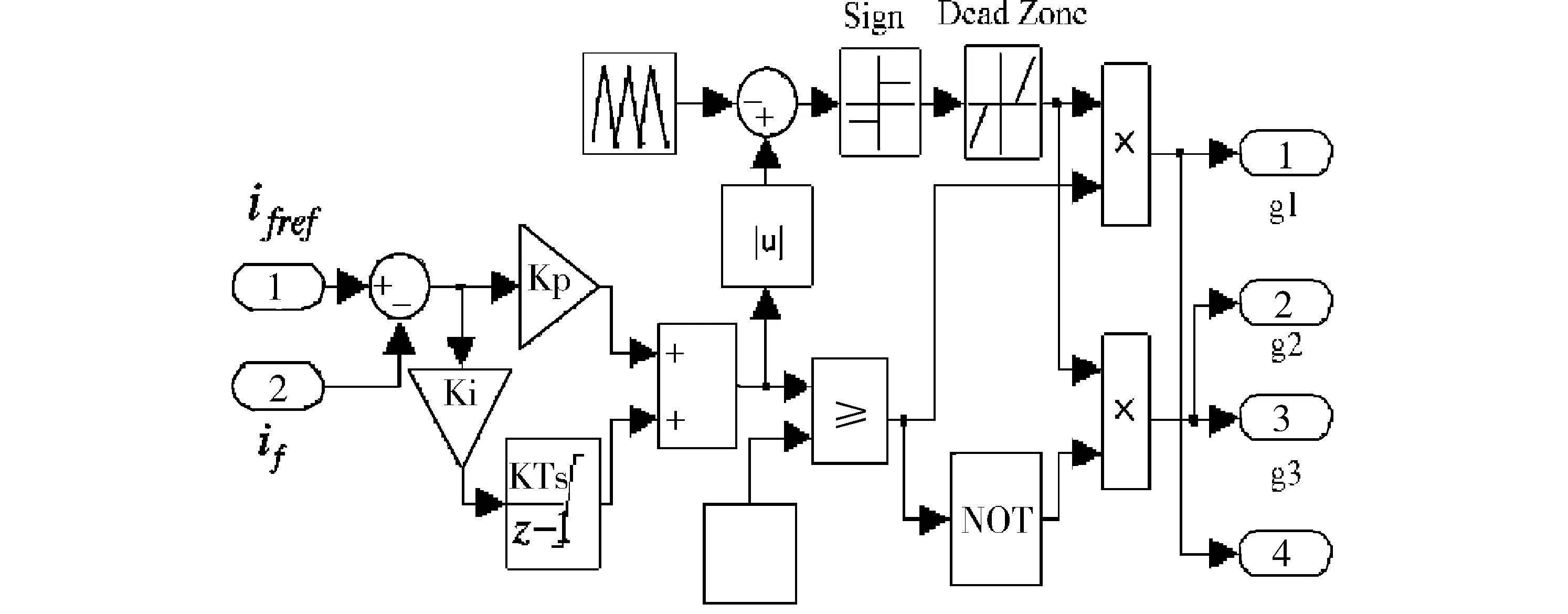
图2 励磁电流PWM产生模块
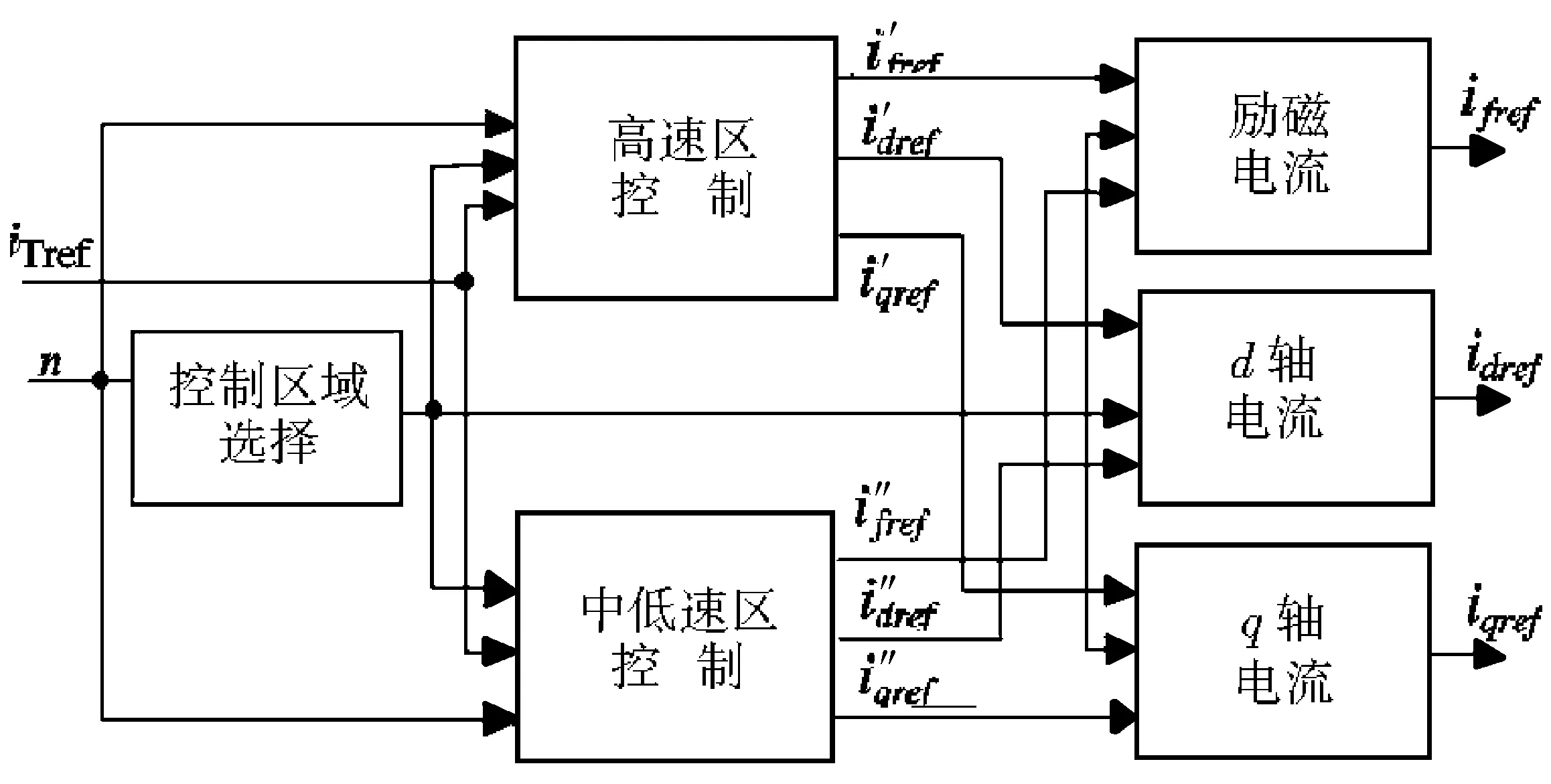
图3 电流分配模块
在HESM控制系统的硬件电路设计中,还包括人机接口与显示电路,这部分电路由单片机AT89C55WD控制,AT89C55WD与TMS320F2812的通信由双口RAM IDT7132来完成的.通过键盘,可以设置电机的给定转速以及发送电机启动、停止、正反转等命令.液晶显示器用来显示给定转速、实测转速及电机的各种运行参数等.
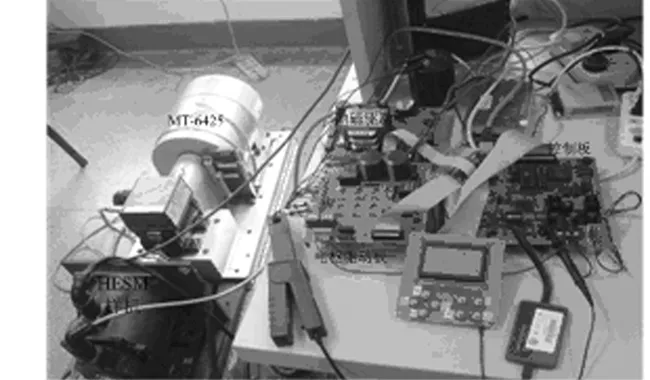
图4 HESM驱动实验系统
2 HESM驱动系统实验
为了验证以上设计的新型HESM控制系统的有效性,搭建了实际的控制电路并进行了相关的驱动实验.HESM样机的有关参数如下:PN=700 W,nN=500 r/min,Ψpm=0.242,p=4,Rs=2.7,Rf=33,Ld=38 mH,Lq=27,Msf=72 mH,下标N表示额定值.
HESM的驱动实验系统见图4.HESM样机的额定直流母线电压为300 V.实验装置为日本小野测器的扭矩工作站专家系统TS-7700,配置的扭矩传感器型号为MT-6425,该设备可用来测量电机的各种性能参数,包括电机的转速、转矩、输入和输出功率及效率等.HESM样机为爪极HESM,内装型号为TAMAGAWA OIH48-2500的增量式光电编码器.控制板是基于TMS320F2812+AT89C55WD架构的电路,另外还包括电枢与励磁两块驱动板和一块控制与液晶显示电路板.
图5为负载1 Nm时HESM的启动电流波形,励磁电流与检测电压的对应关系为1 A/1.5 V,电路设计中加了1.5 V偏置电压,故检测到1.5 V时对应的励磁电流为0 A,HESM的给定转速为2 000 r/min,大于电机的弱磁基速nBdec(1 400 r/min).为提高电机的启动转矩,考虑到励磁绕组电感较大,启动电机前0.5 s给HESM施加一个正向额定励磁电流增磁,随着电机转速升高,励磁电流变小,当转速达到nBdec后,开始弱磁调速,励磁电流与电枢A相电流波形如图5所示.
图6为HESM弱磁运行稳态电流实验波形,电机转速为2 000 r/min,励磁电流if为-1 A,A相电流为正弦波,幅值1.6 A,因负载较轻,电枢电流的主要分量为d轴弱磁电流id,相电流波形比较平滑,谐波较小.
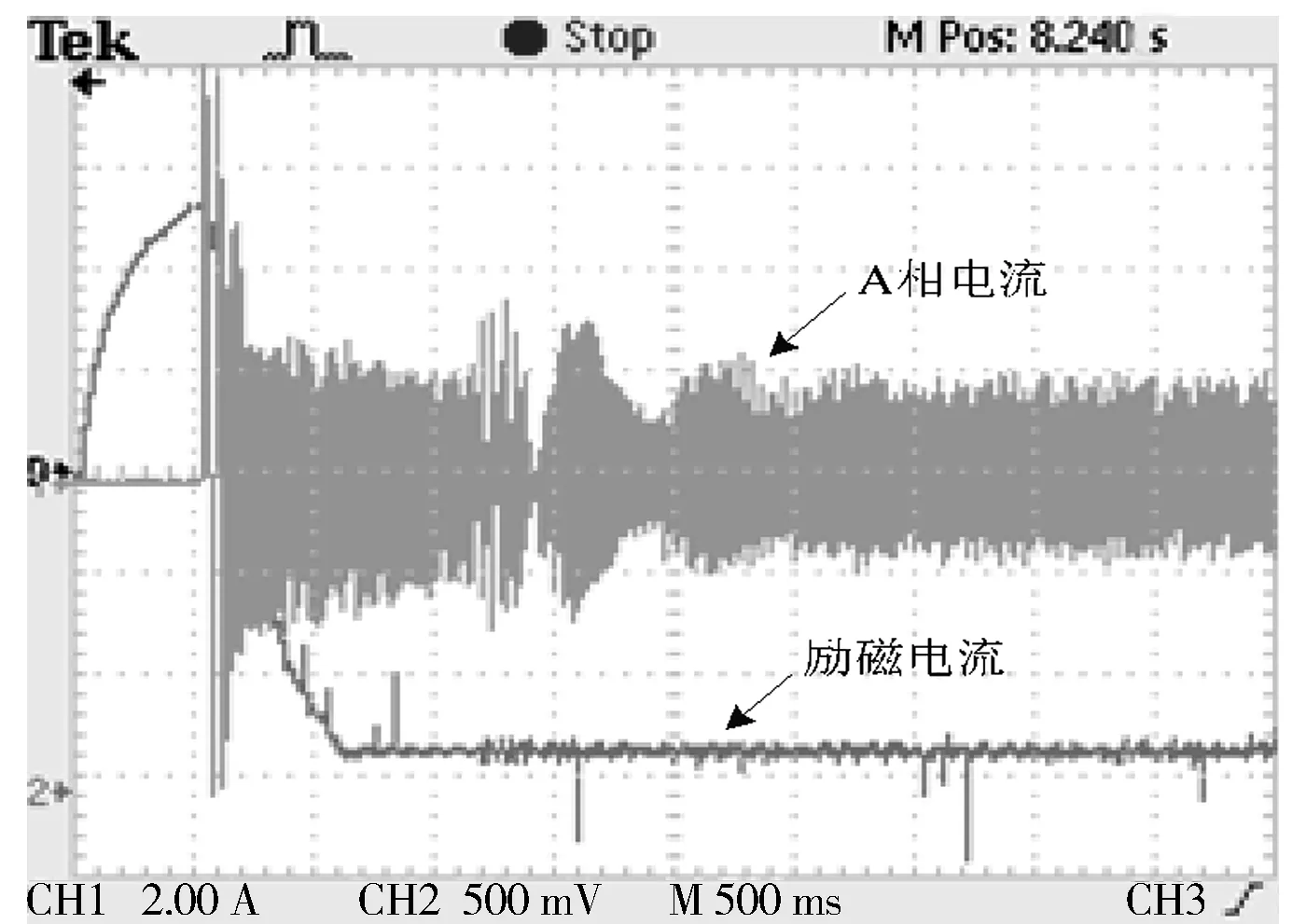
图5 启动过程电流实验波形
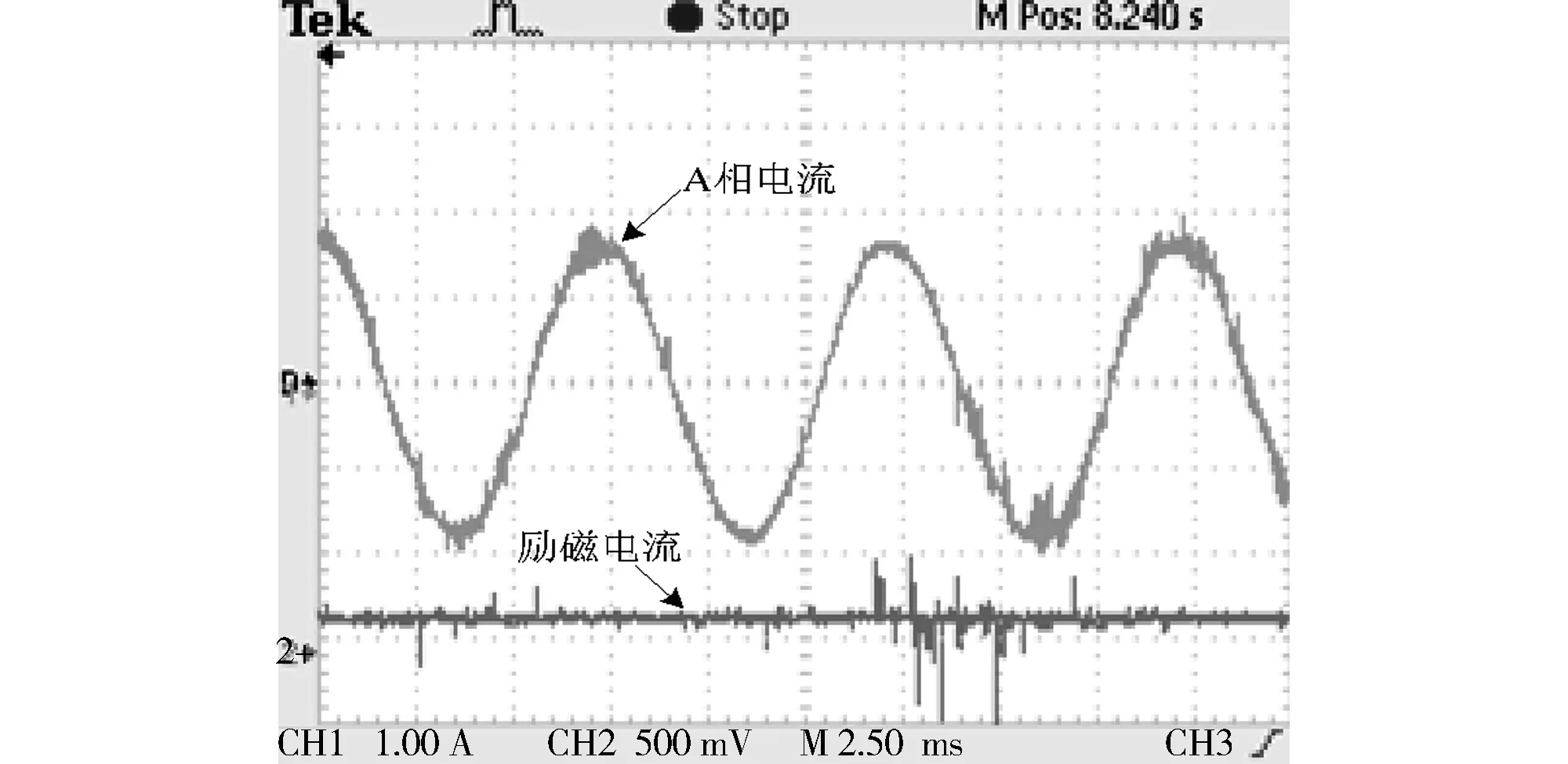
图6 弱磁运行稳态电流波形
图7为不同转速下有无励磁电流控制的最大功率对比实验.无励磁调速时,恒功率区对应转速为700~1 300 r/min;转速超过1 300 r/min后,输出功率迅速下降;转速达到1 600 r/min后,基本已无转矩和功率输出能力.当施加励磁电流时,由于其增磁和弱磁作用,恒功率区扩大至450~1 600 r/min;转速超过1 600 r/min后,虽然不能保持恒功率,但输出功率下降较慢;转速达4 000 r/min时,输出功率还有约200 W.该实验表明,励磁电流的调节作用有效地提高了HESM在低速和高速运行区的负载能力.
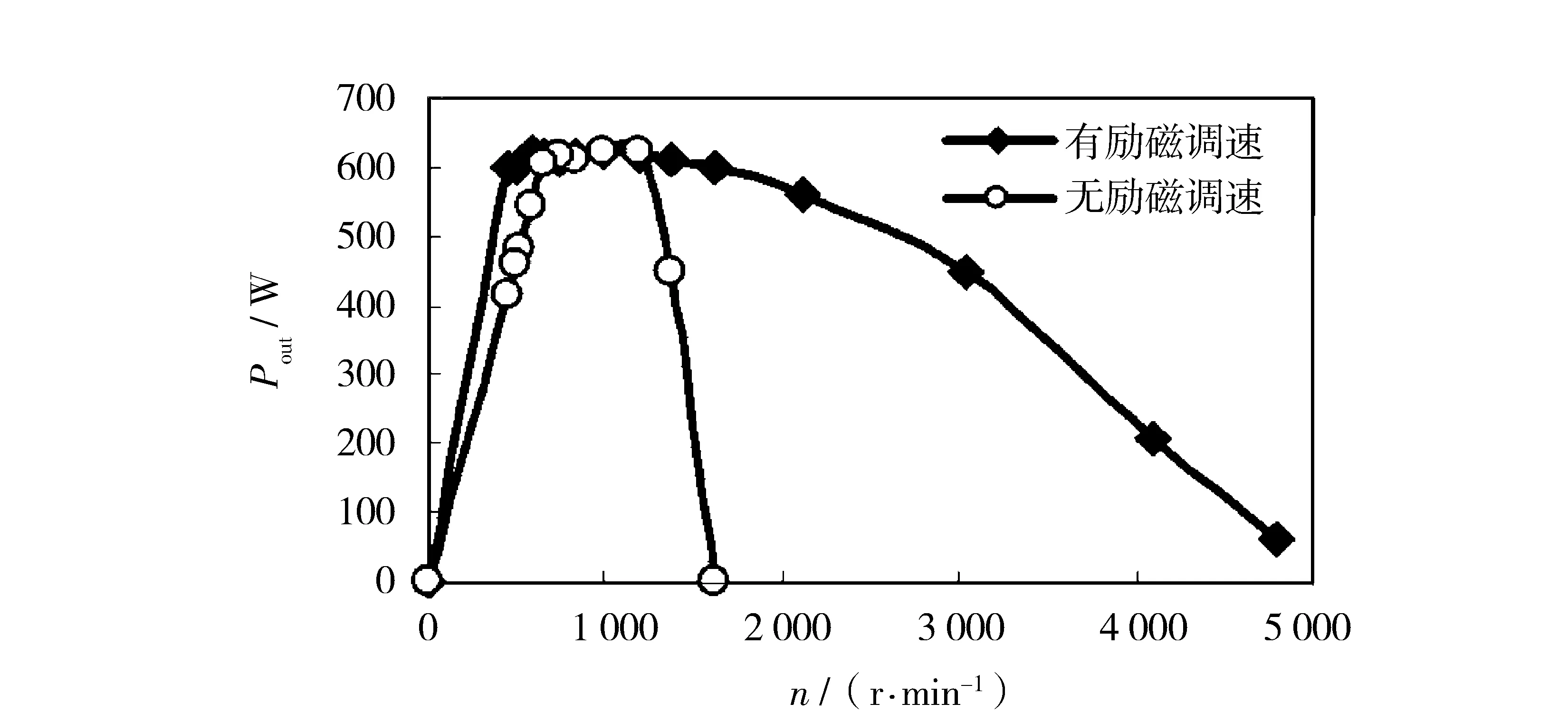
图7 不同转速下对应最大输出功率实验
3 结 论
根据HESM的特点,提出了一种新型的HESM控制系统.理论分析和实验表明,当HESM处于启动或低速运行阶段时,通过给励磁绕组施加增磁电流,可使电机在不过流的情况下获得较大的电磁转矩,缩短了电机启动的过渡时间,提高了电机低速运行时的负载能力;当需要电机高速运行时,通过电流分配器给HESM施加一个合适的反向励磁电流和反向d轴电流进行弱磁调速,可以获得远高于额定转速的恒功率运行范围.由于HESM的低速大转矩和宽调速能力,在航空航天、舰船和电动汽车等领域具有广阔的应用前景.
参考文献:
[1]朱孝勇,程明,赵文祥.混合励磁电机技术综述与发展展望[J].电工技术学报,2008,23(1):30-39.
[2]Cheng F Y,Heyun L,Jian G,et al.Design and analysis of a novel hybrid excitation synchronous machine with asymmetrically stagger permanent magnet[J].IEEE Transactions on Magnetics,2008,44(11):4353-4356.
[3]Luo X G,Lipo T A.A synchronous permanent magnet hybrid AC machine[J].IEEE Transactions on Energy Conversion,2000,15(2):203-210.
[4]Lipo T A. Field weakening for a doubly salient motor with stator permanent magnets: USA, 5 455 473 [P].1995.
[5]John S Hsu. Direct control of air gap flux in permanent magnet machines: USA, 6 057 622 [P].2000.
[6]黄明明,郭新军,徐其兴,等.混合励磁同步电动机宽调速系统及电流分配方法[P].中国:201110276762,2011.
[7]Chan C C,Zhang R,Chau K T,et al.Optimal efficiency control of PM hybrid motor drives for electrical vehicles[C]//Power Electronics Specialists Conference,St. Louis,USA:IEEE,1997:363-368.
[8]Shinji S.New dynamic mathematical model and new dynamic vector simulators of hybrid-field synchronous motors[C]//IEEE International Conference on Electric Machines and Drives,San Antonio,TX,USA:IEEE,2005:882-889.
[9]Shinnaka S.New optimal current control methods for energy-efficient and wide speed-range operation of hybrid-field synchronous motor[J].IEEE Transactions on Industrial Electronics,2007,54(5):2443-2450.
[10]Amara Y,Oujehani K,Hoang E,et al.Flux weakening of hybrid synchronous machines[C]//Electric Machines and Drives Conference,Cambridge,MA,USA:IEEE,2001:367-373.
