全滑移下球形粗糙表面的弹塑性接触模型
2012-07-19李隆球张广玉宋文平
李隆球,王 林,张广玉,宋文平
(1.哈尔滨工业大学材料科学与工程博士后流动站,150001 哈尔滨;2.哈尔滨工业大学机电工程学院,150001 哈尔滨)
全滑移下球形粗糙表面的弹塑性接触模型
李隆球1,2,王 林2,张广玉2,宋文平2
(1.哈尔滨工业大学材料科学与工程博士后流动站,150001 哈尔滨;2.哈尔滨工业大学机电工程学院,150001 哈尔滨)
为研究硬盘磁头和盘面的碰撞接触问题,提出了一种全滑移接触条件下,球形粗糙表面与理想刚性平面的弹塑性接触模型.通过数学建模与MATLAB仿真,分析了球形粗糙表面弹塑性接触状态下接触载荷、实际接触面积和法向接触分离、塑性指数之间的函数关系,并在不同塑性指数条件下,与理想光滑表面模型、CEB(Chang-Etsion-Bogy)模型及全粘着条件下的CKE(Cohen-Kligerman-Etsion)模型进行对比.结果表明:本模型在计算接触面积与接触载荷上比CEB模型及CKE模型更加准确.
粗糙峰;弹塑性接触;球形粗糙表面接触;接触力学
作为研究摩擦磨损的基础,接触问题一直以来是摩擦学研究的重要课题之一,研究物体的接触状态包括接触面积及载荷等对研究粗糙表面的摩擦及磨损有重要的理论意义及工程实际指导意义.当两粗糙表面互相接触时,接触首先会发生在离散化的粗糙峰上,随着载荷的加大,粗糙峰的接触数量不断增多,当大部分粗糙峰被压平后,接触会逐步转到基体上[1].目前,国内外众多学者对粗糙表面的接触进行了一系列研究,其研究的内容和方法包括:1)单粗糙峰与刚性面的弹塑性接触问题及其形貌的影响;2)粗糙峰的分布原则,如指数分布,J.Greenwood等[2]提出的高斯分布等;3)结合单一粗糙峰的研究结果及分布对工程实际粗糙表面进行分析,而对实际粗糙面的研究包括对两基体均为刚性粗糙面,一基体刚性粗糙面与另一基体弹性粗糙面以及两基体都为弹性粗糙面的研究.
全滑移(slip)是一种接触条件,是指理想的、无摩擦的、光滑表面接触,全滑移接触下相互接触的两个接触点在切向上不相互影响,而不是指接触的两个物体存在切向相对运动.全粘着(stick)是对应于全滑移的另一种理想化接触条件,在全粘着接触条件下,相互接触的两个接触点之间在切向是没有相对位移的.在单一粗糙峰与刚性面的接触方面,经典的Hertz接触理论首先给出了全滑移下弹性接触时加载力与位移及接触半径的关系,E.J.Abbott等[3]建立了单一粗糙峰接触的全塑性接触模型,而对于弹塑性接触,目前尚未有完整的数值解,但很多研究学者利用有限元等方法得出了不同的经验公式,如 L.Kogut等[4]基于有限元法建立了全滑移条件下无量纲接触力、接触面积和法向位移的关系;R.Jackson等[5]也建立了类似的经验公式并进行了试验验证.
对于名义粗糙表面的弹塑性接触研究,文献[2]提出了接触力学领域第1个弹塑性接触模型(简称GW模型).该模型假设粗糙表面满足如下条件:①接触表面材料属于各项同性材料;②所有粗糙峰顶部大小相同,近似球形,且半径相同;③所有粗糙峰满足高斯分布原则;④ 粗糙峰之间互不干扰,且基体不会发生变形.W.Chang等[6]的研究发展了GW模型,并对GW模型进行了改进,提出了一个新的粗糙表面接触模型(即CEB模型).CEB模型中,粗糙峰的弹性变形和塑性变形之间存在一个临界点,在该临界点两边分别是纯弹性变形和纯塑性变形,两者并无过渡,因此,该模型中粗糙峰的变形存在一个跳跃点,并不完全符合实际接触工况.
球形粗糙表面是指在半径一定的球体表面上分布有不同半径的粗糙峰,而粗糙峰在高度上,满足特定的分布准则,因此,球形粗糙表面与名义粗糙表面有着本质的区别.对于球形粗糙表面的接触研究,G.A.Greenwood 等[7]首先建立了球形粗糙表面与刚体平面的接触模型,该模型是除了球体本身产生变形外,粗糙峰也会产生变形.不难看出,当两接触表面的载荷较大时,粗糙峰的影响很小甚至可以忽略不计,因此,此时可近似用Hertz理论进行求解,相反,当载荷较小时,需同时考虑粗糙峰和基体变形.但该模型存在一定的局限性,即球形表面的基体无塑性变形产生,仅产生弹性变形.工程实际中,对于球形粗糙表面的接触,球形基体本身和接触表面粗糙峰本身都会产生弹性、弹塑性及全塑性变形,或者是以上3种变形的组合,因此,球形粗糙表面的接触研究显得相当复杂.在综合考虑了弹性接触阶段的Hertz理论,和弹塑性阶段 V.Brizmer等[8-9]的接触力、接触面积和接触分离距离等经验公式后,D.Cohen等[10]给出了球形粗糙表面的弹塑性接触理论模型——CKE模型,该模型假设粗糙峰及球体本身皆可发生弹性及弹塑性变形.通过理论推导和数值求解,分别得出了无量纲接触面积、接触力与塑性指数、无量纲表面距离等参数的经验公式.但该模型仍然存在一定的局限性,因为该模型假设刚性面与弹性球的接触条件为完全黏着,且粗糙峰只会产生纯塑性变形.因此,为弥补以上模型的不足,L.Li等[11]假设球形表面粗糙峰不仅会发生弹性和弹塑性变形,也会发生全塑性变形,并提出了一个全黏着条件下,综合考虑以上3种变形及各种可能组合的球形粗糙表面弹塑性接触模型,该模型采用文献[5]提出的单一粗糙峰全塑性接触理论.但该模型只是完全黏着条件下的接触,并不能应用于本文所要研究的全滑移接触条件下的球形粗糙表面的弹塑性接触,此外,文献[11]的模型在计算单一粗糙峰的全塑性接触力和面积时,限定材料的性质范围为100≤E/Y≤1 000,无量纲化法向作用位移范围为100≤ω/ωc≤400,并不能包含所有材料和作用力的粗糙峰接触,与文献[3]的全塑性接触理论相比,也有一定的局限性.
国内学者在粗糙表面接触问题上也有较多的研究成果,如赵永武等[12]采用函数插值法模拟单一粗糙峰弹塑性接触时的接触力、接触面积与接触位移的关系,并得到粗糙表面的弹塑性接触模型;杨楠等[13]采用有限元法模拟了多粗糙峰的弹塑性接触;佟瑞庭等[14]采用有限元法分析了二维粗糙峰涂层表面的弹塑性接触等.但这些接触研究都假定粗糙表面的基体为平表面,与本文研究的球形粗糙表面的球形基体并不相同.
本文基于Hertz弹性接触理论、弹塑性接触经验公式及纯塑性接触理论,结合文献[2]提出的粗糙表面粗糙峰的高斯分布原则,建立一个全滑移条件下的球形粗糙表面弹塑性接触数学模型,该模型中球形粗糙峰及球基体本身都会发生弹性、弹塑性及全塑性变形,并得出接触力、接触面积与塑性指数、无量纲表面距离的函数关系,通过与CEB、CKE模型的比较,证实了该模型的科学性和准确性.
1 球形粗糙面与理想刚性平面的接触分析概述
文献[7]提出两个粗糙表面的接触可以用一个等效粗糙表面与一个光滑的刚性表面接触来代替,其中,粗糙峰在刚性面或在弹性球上对最终结论没有任何影响.因此,本文为简化计算过程,将粗糙峰等效在刚性面上,本身不产生任何变形,而球形表面则为理想光滑弹性体,如图1所示.

图1 光滑弹性球与粗糙刚性表面接触分析示意图

本文假设所有粗糙峰在高度上满足高斯分布,因此,概率密度函数可以表示为

将其按照表面高度的均方差值σ进行归一化,得到

式中:σ为粗糙表面高度的均方差值;σs为粗糙峰高度的均方差值.
同时σs和σ之间存在以下相互关系

式中:β为表面粗糙度参数β=ηρσ;z为粗糙峰的高度;η为粗糙峰的面密度.
粗糙峰平均高度和球体模型间的距离d和h之间存在关系为

参与实际接触的粗糙峰N为

式中:An为名义接触面积.
单个粗糙峰的法向位移量可表示为

2 单一粗糙峰与刚性平面的接触分析
为研究光滑弹性球与粗糙刚性平面的接触行为,首先需得出单一粗糙峰与刚性平面的接触变化规律,并结合其在高度上的分布规律最终建立球形粗糙表面的弹塑性接触模型.由上述分析可知,单一粗糙峰与刚性平面接触时,会产生弹性、弹塑性及全塑性变形或以上3种变形的组合,因此,本文将对单一粗糙峰的上述3种接触状态分别展开进行研究.
2.1 单一粗糙峰与刚性平面的弹性接触
当接触变形ω足够小时,粗糙峰发生弹性变形.由Hertz接触理论可知,平均接触压力和实际接触面积与接触变形ω的关系被无量纲化后可分别表示为

式中:Pc、ωc、Ac分别为单一弹性球与刚性平面接触初始屈服点出现时的临界载荷值、临界法向变形及临界接触面积,并满足


2.2 单一粗糙峰与刚性平面的弹塑性接触
由分析可知,当加载的法向变形大于临界法向变形ωc时,弹性球与刚性平面间会发生弹塑性接触,弹性粗糙峰发生弹塑性变形,直到全塑性变形的产生.在弹塑性变形阶段,研究表明,目前尚未有任何精确解,现有的研究一般是利用有限元法得出的经验公式进行求解,在完全滑移条件下,本文将采用文献[4]提出的经验公式,其中接触面积和接触载荷与法向变形的关系可表示为

2.3 单一粗糙峰与刚性平面的全塑性接触
文献[4]通过有限元分析计算指出,在持续载荷作用下,当法向变形超过110倍的临界法向变形时,弹性粗糙峰将处于全塑性变形状态,因此根据文献[3]给出的理论,当弹性球与刚性平面处于全塑性接触的时候,接触力及接触面积和法向位移之间关系式为

式中:H为硬度值.
3 球形粗糙面与理想刚性面的接触模型
根据文献[2]的假设,粗糙峰之间没有相互作用,因此每个粗糙峰的法向接触力、接触面积只与其自身的变形量有关,文献[6]推导出实际的法向接触力、接触面积的公式为

而对于粗糙球与刚性平面的接触,文献[10]给出了模型

将式(1)代入到式(3),得到只发生弹性变形的粗糙峰产生的总接触力为

将式(4)通过在垂直和水平方向上归一化可以得到

对于粗糙表面,文献[2]引入了一个新的无量纲参数——塑性指数ψ,文献[10]给出了关于屈服强度的表达式为

由式(2)和(6)可以得到

同理,对于处于弹性、弹塑性及全塑性接触的粗糙峰所能承受的载荷可表示为

其中式(8)中第1项表示处于弹性接触的粗糙峰,第2和第3项为弹塑性接触的粗糙峰,第4项为全塑性变形的粗糙峰.
4 模型求解与讨论
4.1 模型计算方法及主要参数确定
为求解式(8)中接触力与分离距离之间的函数关系,需采用迭代法进行计算.具体计算过程为:在某一给定初始预载荷下,两接触表面将产生一定的预变形,其中,靠近球顶部的部分粗糙峰被压平,于是可得出初始的名义接触面积A和初始接触半径a,并得出分离距离h,由此,可计算新的接触力和新的名义接触面积,以此类推,直到前后接触载荷达到预设的收敛准则(误差 <5%).具体求解流程如图2所示.

图2 粗糙表面接触分析求解流程图
球形粗糙表面接触主要形貌参数及材料性能参数如表1所示,根据研究,R/ρ的取值与计算结果无关[15],为便于计算本文取R/ρ=20.

表1 球形粗糙接触模型表面形貌及材料性能参数
4.2 几种模型计算结果的比较与讨论
图3所显示的是3种不同塑性指数ψ=0.5、2.0及16.0条件下,有效接触面积与名义接触面积的比率A0/An关于无量纲载荷P/P的函数,其中:Pcs为理想光滑球基体在塑性变形产生时的临界接触载荷;A0为有效接触面积.CEB、CKE模型及理想光滑球接触模型也同时在图中绘出方便比较.理想光滑表面名义接触面积A可以通过如下得出

从图中可以看出,对于较小载荷条件下,粗糙表面实际接触面积远小于名义接触面积(即相应理想光滑表面接触时),这是因为粗糙表面中部分粗糙峰处于弹塑性或全塑性接触,局部接触压力较大,因此,对于相同的接触载荷,实际有效接触面积比名义接触面积小.这与文献[2]提出的理论是完全相符的.在较低的塑性指数条件下,如ψ =0.5、2.0,本文模型与CKE模型符合很好,因为两个模型都考虑到粗糙峰不仅有弹性接触,还会有弹塑性接触,而由文献[2]的预测,在此时,大部分粗糙峰处于弹塑性接触.而CEB模型因为未考虑粗糙峰的弹塑性接触阶段,认为粗糙峰一旦达到初始屈服点就会进入全塑性变形,而对于全塑性状态下,相同的接触载荷只会产生较小的接触面积,因此,CEB模型中部分粗糙峰已经处于全塑性状态,平均接触压力已达到极限值——硬度值,故相同载荷下CEB模型所预测的接触面积要比本文模型要小.而当塑性指数ψ=16.0时,由文献[2]的理论,基本上所有的粗糙峰都处于全塑性接触状态,而全塑性状态下的粗糙峰在相同载荷下都会有相同的接触面积,式(8)中第4项占据绝大部分,故与CEB模型的结果比较类似或者相同,而CKE模型因为没有考虑粗糙峰的全塑性变形,认为平均接触压力可以无限增大,因此,在相同载荷下,相反会得到较小的接触面积,可见不考虑粗糙峰的全塑性变形是不全面的.
此外也能从图3中看出,随着塑性指数的增加,有效接触面积等于名义接触面积值时的无量纲临界载荷也在增加,即在塑性指数ψ=0.5时的临界载荷大约为5,而对于塑性指数ψ=16.0时的临界载荷增大到将近80.这是因为,对于大塑性指数条件下,粗糙峰的分布比较分散,其高斯分布均方差较大,要克服所有粗糙峰的影响需将所有粗糙峰压平,因而所需要的载荷相对较大.
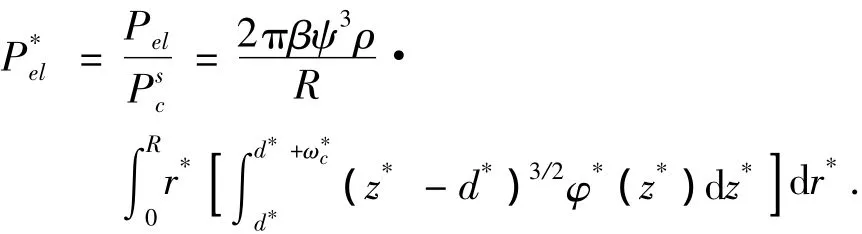
图4所显示的是3种不同塑性指数ψ=0.5、2.0及16.0条件下无量纲接触面积与无量纲载荷的函数关系,其中,Acs、Pcs分别为理想光滑球基体在初始塑性变形产生时接触面积及接触载荷.从图中可以看出,当所加载荷较小时,所有粗糙球模型与理想光滑表面模型都存在很大的分歧,这主要由于载荷很小时,粗糙峰对接触有很重要影响导致实际有效接触面积比名义接触面积要小.当载荷加大到一定程度时,粗糙表面模型与理想光滑表面模型重合,这是因为在较大载荷下,粗糙峰的影响可以忽略不计,粗糙表面可以等效为理想光滑表面,这与文献[2]的理论是基本一致的.从图4(a)、(b)中可以看出,对于 ψ =0.5、2.0下,根据文献[2]的理论,粗糙表面处于弹塑性接触状态,本文模型与 CKE模型基本重合,而与CEB模型差距较大,即相同载荷下,本文模型与CKE模型得到的接触面积比CEB模型接触面积要大.这是因为CEB模型并没有考虑粗糙峰接触的弹塑性状态而假定认为当粗糙峰达到初始塑性变形点时就会进入全塑性状态.而当塑性指数ψ=16.0时,基本上所有的粗糙峰都处于全塑性接触状态,故与CEB模型的结果比较接近,同前面所述,CKE模型因没有考虑粗糙峰的全塑性变

图3 有效接触面积与名义接触面积比率和无量纲载荷的函数关系
另外,可以从图4中可以看出,随着塑性指数ψ增加,CEB模型与本文模型较为接近,而CKE模型与本文模型相差加大,这是因为在高塑性指数条件下,基本上所有粗糙峰处于全塑性状态.
5 结论
1)对于相同且较小的塑性指数条件下,本文模型与CKE模型所预测的有效接触面积与名义接触面积的比率,及无量纲接触面积相同,但比CEB模型预测的接触面积大.形,假定平均接触压力可以不断增大甚至超过极限值,这也是不全面的.
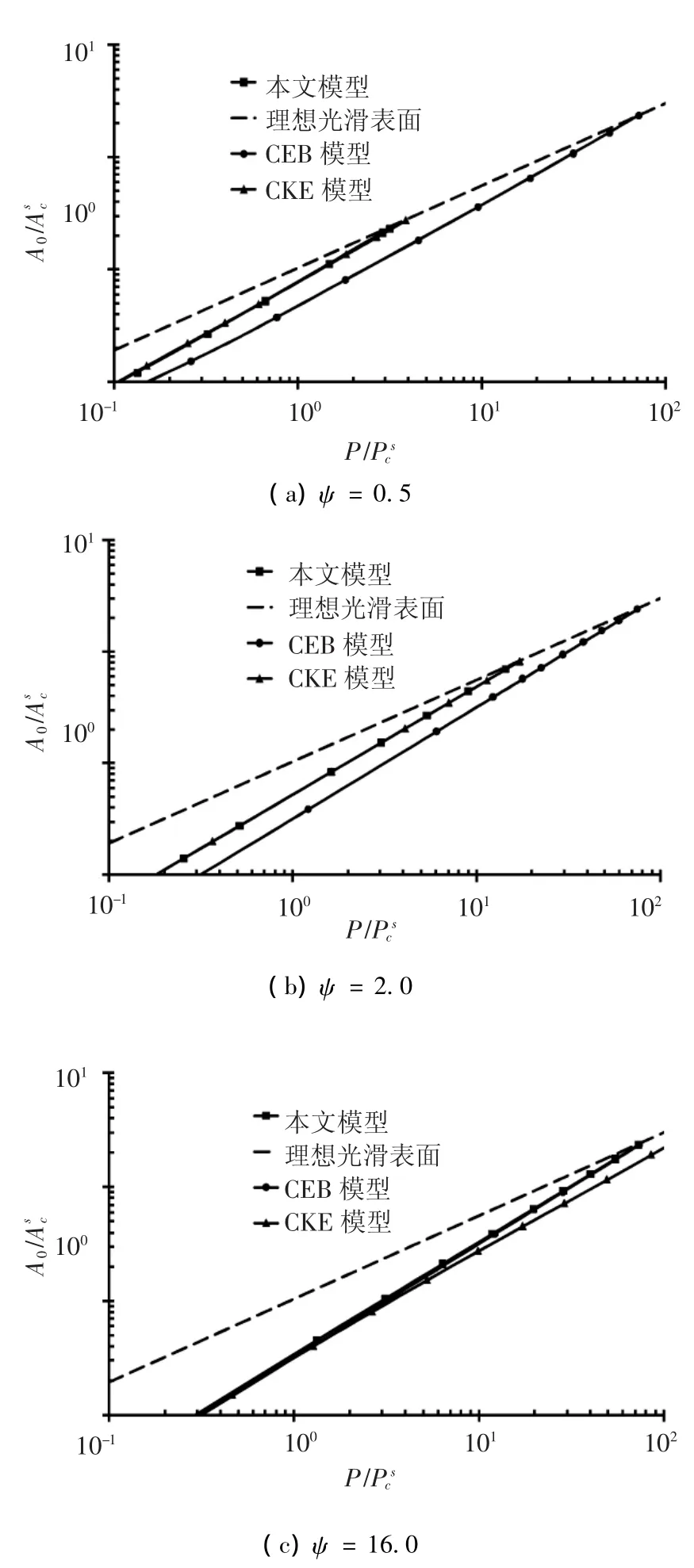
图4 无量纲化接触面积与无量纲化载荷的函数关系
2)对于相同且较大的塑性指数条件下,本文模型与CEB模型所预测的有效接触面积与名义接触面积的比率,及无量纲接触面积相同,但比CKE模型预测的接触面积大.
3)随着载荷的增加,粗糙峰对接触面积的影响越来越小.
4)随着塑性指数的增加,在相同载荷下,有效接触面积与名义接触面积的比率会随着变小,因此,临界接触载荷随着增加.
[1]JOHNSON K L.Contact mechanics[M].Cambridge,UK:Cambridge University Press,1985.
[2]GREENWOOD J A,WILLIAMSON J B P.Contact of nominally flat surfaces[J].Mathematical and Physical Sciences,1966,295(1442):300 -319.
[3]ABBOTT E J,FIRESTONE F A.Specifying surface quality-a method based on accurate measurement and comparison[J].Mechanical Engineering,1933,(55):569-572.
[4]KOGUT L,ETSION I.Elastic-plastic contact analysis of a sphere and a rigid flat[J].Journal of Applied Mechanics,2002,69:657 -662.
[5]JACKSON R L,GREEN I.A finite element study of elasto-plastic hemispherical contact against a rigid flat[J].Journal of Tribology,2005,127(2):343-354.
[6]CHANG W R,ETSION I,BOGY D B.Elastic plastic model for the contact of rough surfaces[J].Journal of Tribology,1987,109(2):257-263.
[7]GREENWOOD J A,TRIPP J H.The elastic contact of rough spheres[J]. Journal of Applied Mechanics,1967,34(1):153-159.
[8]BRIZMER V,KLIGERMAN Y,ETSION I.The effect of contact conditions and material properties on the elasticity terminus of a spherical contact[J].International Journal of Solids and Structures,2006,43(18/19):5736-5749.
[9]BRIZMER V,ZAIT Y,KLIGERMAN Y,et al.The effect of contact conditions and material properties on elastic-plastic spherical contact[J].Journal Mechanics Materials Structures,2006,1(5):865 -879.
[10]COHEN D,KLIGERMAN Y,ETSION I.A model for contact and static friction of nominally flat rough surfaces under full stick contact condition[J].Journal of Tribology,2008,130(3):031401.1-031401.9.
[11]LI L,ETSION I,TALKE F.Contact area and static friction of rough surfaces with high plasticity index[J].Journal of Tribology,2010,132(3):031401.1 -031401.10.
[12]赵永武,吕彦明,蒋建忠.新的粗糙表面弹塑性接触模型[J].机械工程学报,2007,43(3):95-101.
[13]杨楠,陈大融,孔宪梅.多粗糙峰弹塑性接触的有限元分析[J].摩擦学学报,2000,20(3):202-206.
[14]佟瑞庭,刘更,刘天祥.二维多粗糙峰涂层表面的弹塑性接触力学分析[J].机械科学与技术,2007,26(1):21-24.
[15]COHEN D,KLIGERMAN Y,ETSION I.The effect of surface roughness on static friction and junction growth of an elastic-plastic spherical contact[J].Journal of Tribology,2009,131(2):021404.1-021404.10.
Elastic-plastic model for rough spherical contact in slip contact condition
LI Long-qiu1,2,WANG Lin2,ZHANG Guang-yu2,SONG Wen-ping2
(1.Material Science and Engineering Post-doctorate Research Institutions,Harbin Institute of Technology,150001 Harbin,China;2.School of Mechatronics Engineering,Harbin Institute of Technology,150001 Harbin,China)
To investigate the impact of magnetic heads on disk in a hard disk drive,an elastic-plastic contact model for rough sphere contacting rigid flat in slip contact condition is provided.The normal load and the real contact area as functions of separation and plasticity index for the rough spherical elastic-plastic contact are investigated by mathematical modeling and MATLAB simulating.The results are compared with the perfect smooth spherical contact model,CEB(Chang-Etsion-Bogy)model and CKE(Cohen-Kligerman-Etsion)model in stick contact condition for different values of the plasticity index.It is shown that the normal load and real contact area of present model are more accurate than that of the CEB and CKE models.This is because the CEB and CKE models neglect the elastic-plastic contact and fully plastic of a single asperity,respectively,resulting in the limitation for the analysis.
asperity;elastic-plastic contact;rough spherical contact;contact mechanics
O343.3 O344.1
A
0367-6234(2012)09-0062-07
2011-09-25.
国家自然科学基金资助项目(51105099);中国博士后基金资助项目(49).
李隆球(1982—),男,讲师,博士;
张广玉(1961—),男,教授,博士生导师.
李隆球,longqiuli@gmail.com.
book=44,ebook=176
(编辑 张 红)