无人旋翼机转弯飞行导航控制研究
2012-07-04王道波盛守照
陈 淼, 王道波, 盛守照, 张 元
(1.南京航空航天大学自动化学院,南京 210016;2.中国人民解放军94032部队,甘肃 武威 733003)
0 引言
无人驾驶自转旋翼机(简称无人旋翼机)是一种以自转旋翼作为升力面,螺旋桨推/拉力为前进动力的旋翼飞行器[1],具有其独特的优点:可以短距离起飞着陆且起飞着陆的速度很低,容易保证起飞着陆的安全;操纵灵活,无动力下滑能力强,飞行中不会失速[2];旋翼机结构简单,不需安装昂贵笨重的减速器等传动机构,也不需要复杂的桨距/油门协调操纵机构以及液压助力系统等,且自转旋翼气动效率高,自转工作状态好,振动水平和噪声都比直升机小[3-4]。
旋翼机早于直升机出现,但因其无法悬停导致被直升机取代。直到20世纪90年代,旋翼机因其许多相对优势又重新获得开发并应用,截至目前美国警方已装备Hawk-4型有人驾驶自转旋翼机[4],国内亦有航空爱好者自行制作简易的有人驾驶自转旋翼机,并已成功飞行,但尚未无人化。旋翼无动力是旋翼机与直升机最大的区别,因此它无法垂直起飞,需靠发动机推动/牵引向前滑跑获得速度,旋翼经来流吹动旋转获得足够拉力拉起飞机方能起飞。但除了无法垂直起飞,旋翼机有着直升机不可比拟的优点,它在飞行过程中,旋翼始终处于自转状态不会失速,即使发动机空中停车,旋翼也会在相对气流的作用下自转,保证飞机安全着地;此外,自转旋翼是靠风力驱转的,运用空气动力学原理分析,在桨盘平面内,部分区域提供驱转扭矩,部分区域提供阻转扭矩,两部分扭矩相互平衡时,旋翼转速达到稳定[4],因此,与发动机驱转旋翼相比,自转旋翼传到机身上的反扭矩非常小,在工程上可以忽略不计,故而自转旋翼机不需要像直升机那样安装尾桨来平衡旋翼扭矩。在很多不要求悬停的场合,自转旋翼机凭借其低成本、经济、安全等优势完全可以取代直升机。作为风转旋翼,与驱转旋翼相比也有不足,诸如操纵滞后性强、强非线性等。另外,就旋翼机控制技术来讲,国内航空爱好者自行制作的简易旋翼机,也只是依靠人为经验操纵进行了近地飞行,尚未上升到飞行控制技术研究的高度,而且,国内目前也尚未见关于无人化旋翼机研制的报道。因此,开展无人旋翼机飞行控制技术研究具有重要意义。
协调转弯是无人飞行器常用飞行模态,尤其在对地面目标进行盘旋侦察时更显必要性。协调转弯是指飞行器在水平面内连续改变飞行方向,并能保持高度不变的一种转弯方式。飞行器进行转弯飞行时,滚转运动与偏航运动并不独立从而产生侧滑角,使飞行阻力增大、乘坐品质变差,不利于机动[5],需克服或消除侧滑实现协调转弯。由于旋翼机是以旋翼操纵机体横滚,因此其横侧向特性更接近于直升机,目前关于直升机转弯导航控制已有一些研究[6-8],无人旋翼机横侧向控制技术研究目前尚未见报道。旋翼机与直升机毕竟还有不同之处,故有必要对无人旋翼机飞行控制作专门研究。
转弯飞行导航研究无人旋翼机向任意目标航点或航线飞行的导航控制策略,当指令航点或航线不在当前航向上时,如何控制无人旋翼机以最优姿态实现转弯飞行就显得非常重要。无人旋翼机协调转弯飞行的关键是高度保持和航迹的修正,本文提出一种利用航迹侧偏距离及侧偏速度反馈控制的协调转弯飞行策略,并对某无人旋翼机原理样机进行了地面仿真试验。
1 无人旋翼机转弯飞行受力分析
本文采用文献[9]坐标系,无人旋翼结构及平直飞行时纵向受力情况如图1所示。该旋翼机采用主支撑架、全动垂尾、无平尾、前三轮着地,后轮悬空式设计。图1所示为侧视图,两主轮重合,在静止状态下,主支撑架垂直于地面,螺旋桨发动机及旋翼安装在主支撑架上,由两侧两个主轮共同支撑,前轮辅助支撑,发动机推力在飞机对称平面内且与机体轴纵轴平行,两片桨叶跷跷板式旋翼,桨距角固定安装。在重心配置上采用高重心配置,即发动机推力提供抬头力矩,旋翼拉力提供低头力矩。
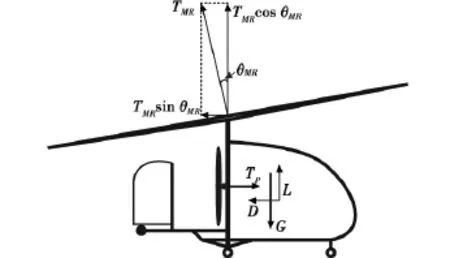
图1 某无人旋翼机纵向受力分析Fig.1 Longitudinal force analysis of an unmanned rotorcraft
图中:θMR为旋翼桨盘与机体轴的夹角,若机身迎角为α,则桨盘迎角为αMR=α+θMR;旋翼拉力TMR垂直于桨盘向上;发动机推力Tp在机体纵向对称面内与机体轴x轴平行;G为飞机重力;L和D分别为机身所受的气动升力与阻力,作用在气动焦点上,其大小取决于飞行速度V,可表示为
式中:ρ为空气密度;CL为升力系数;CD为阻力系数;S为气动参考面积。旋翼拉力TMR大小与飞行速度及桨盘迎角有关,并且与二者呈非线性关系,即

经试验验证:在操纵范围内,旋翼拉力随桨盘迎角以及前飞速度的增大而增大,其非线性关系曲线可以通过吹风试验[10]以及成本较低的地面拉跑试验获得。
无人旋翼机转弯飞行导航中,偏航角及航迹偏转角是主要控制目标,控制偏航角以克服或消除侧滑角,控制航迹偏转角是为了控制速度方向与规划航迹保持一致,以达到航迹跟踪效果。
由物理学匀速率圆周运动知:物体作匀速率圆周运动,需具备恒定的向心力。因此无人旋翼机实现协调转弯飞行须满足:
1)旋翼拉力在竖直方向上的分力与旋翼机所受重力相等;
2)旋翼拉力在航迹线速度方向上的分力与空气阻力及发动机推力平衡;
3)旋翼拉力大水平方向的分力应指向圆弧航迹的圆心,与飞机转弯受到的离心力相等。
纵向及横侧向受力分别如图1和图2所示。
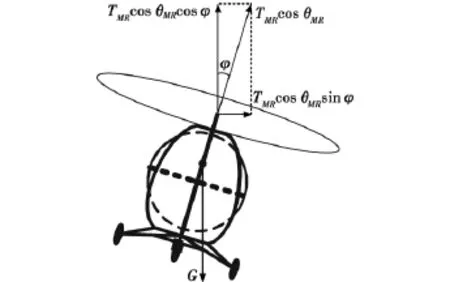
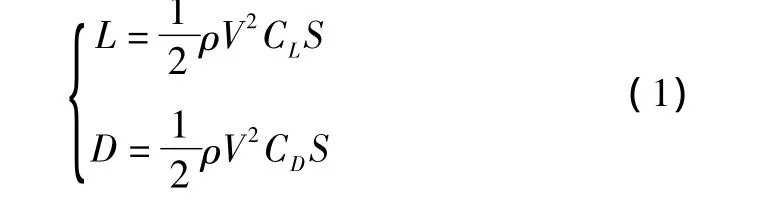
图2 某无人旋翼机横侧向受力分析Fig.2 Lateral force analysis of an unmanned rotorcraft
图2中,φ为滚转角。为研究无人旋翼机转弯时对圆弧航迹的跟踪效果,设无人旋翼机进行定高度顺时针盘旋飞行,盘旋半径为R,速度为V,如图3所示。
图3 转弯飞行速度分解Fig.3 Velocity resolution in turning flight
从图3中可以看出,需要在盘旋过程中不断地改变旋翼机速度方向(航向)使旋翼旋转平面始终向圆心方向倾斜,但是大小不变,以平衡各方向的力,保持盘旋航迹。由式(2)可得,旋翼拉力大小取决于飞行速度和桨盘迎角,故在盘旋过程中,要保持旋翼拉力大小不变,需稳定飞行速度和桨盘迎角,但旋翼机在盘旋过程中不断改变航向,而且机身相对盘旋圆心有个滚转角,故纵横向之间有耦合。由空间几何关系可知,飞机顺时针盘旋有正滚转角φ,俯仰角θ和偏航角ψ之间相互影响关系为

针对该情况,在控制律设计中可采用前馈补偿实现纵横向解耦[11]。一方面,随着偏航角的不断改变,机身俯仰角也不断改变,引起高度的变化,故而需不断调整桨盘迎角,修正飞机俯仰姿态以稳定飞行高度;另一方面,调整桨盘迎角也改变了旋翼拉力在纵向平面内沿机体轴x轴方向上的分力,从而改变飞行速度,进而又改变旋翼拉力,因此需不断调整发动机推力,配合旋翼的操纵以稳定前飞速度。综上所述,无人旋翼机纵横向之间存在着强烈的耦合,实现定高度盘旋飞行需满足
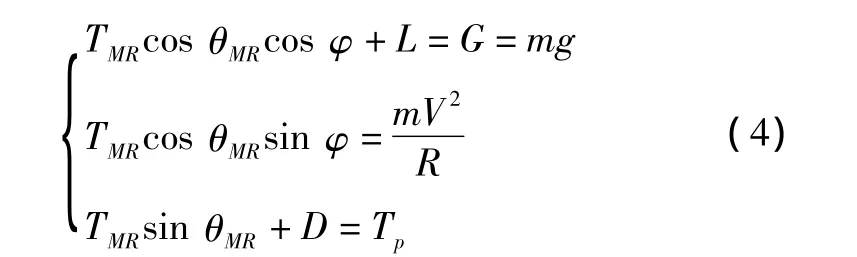
式中:m为旋翼机质量;g为重力加速度;TMR为旋翼拉力;V为飞行速度;R为转弯半径;L和D分别为机身所受的气动升力与阻力。
2 转弯飞行导航分析
在设计导航控制律时,习惯上以导航坐标系为基准。在顺时针盘旋过程中,无人旋翼机从圆弧航迹的一点飞到另一点,线速度V的方向改变一个角度,其大小等于飞过的圆弧对应的圆心角。以各个坐标点为例进行分析,将线速度V分解在导航坐标系的xn轴和zn轴上。如图3所示,设圆弧航迹的圆心为O(zo,xo),给定偏航角ψg(t)(定义为机体轴与导航坐标系xn方向的夹角,在盘旋飞行过程中,偏航角指令是连续变化的)。
分析各航点速度方向与偏航角指令:
1)当无人旋翼机飞行到A点时,偏航角指令ψ(t)=0°,将V分解到xn轴和zn轴方向得Vxn=Vcos ψ=V 为正值,Vzn=Vsin ψ =0;
2)当无人旋翼机飞行到B点时,偏航角指令ψ∈[0°,90°],将 V 分解到 xn轴和 zn轴方向得 Vxn=Vcos ψ为正值,Vzn=Vsin ψ为正值;
3)当无人旋翼机飞行到C点时,偏航角指令ψ=90°,将V分解到xn轴和 zn轴方向得 Vxn=Vcos ψ=0,Vzn=Vsin ψ =V 为正值;
4)当无人旋翼机飞行到D点时,偏航角指令ψ∈[90°,180°],将 V 分解到 xn轴和 zn轴方向得 Vxn=Vcos ψ 为负值,Vzn=Vsin ψ 为正值;
5)当无人旋翼机飞行到E点时,偏航角指令ψ∈[-90°,-180°],将 V 分解到 xn轴和 zn轴方向得Vxn=Vcos ψ为负值,Vzn=Vsin ψ为负值;
6)当无人旋翼机飞行到F点时,偏航角指令ψ∈[0°,-90°],将 V 分解到 xn轴和 zn轴方向得 Vxn=Vcos ψ 为正值,Vzn=Vsin ψ为负值。
综上所述,顺时针盘旋时:Vxn=Vcos ψ,Vzn=Vsin ψ。逆时针盘旋时符号相反。由此得理想状况下转弯飞行导航控制律为

式中,符号函数sgn(+)表示顺时针转弯为正,逆时针转弯为负。
3 航迹侧偏修正
以上理想盘旋飞行状况下的导航控制律,没有考虑受到干扰后的侧偏修正问题,下面针对这个问题进行分析。
如图4所示,设旋翼机沿圆弧航迹从点A(zA,xA)顺时针飞到点D(zD,xD),圆弧航迹对应的圆心位置为O(zo,xo)。受扰动偏离航迹,当前位置为 P(z,x)。令旋翼机在位置P(z,x)偏离航迹的距离为d,侧偏速度为Vd,速度方向偏离指令航向Δψg。定义侧偏距离d为无人旋翼机当前位置到圆弧航迹圆心的距离与盘旋半径之差,d的正负号表示偏离圆弧外或者圆弧内,d大于零时表示无人直升机偏离到圆弧外,d小于零时表示无人直升机偏离到圆弧内;侧偏速度Vd为无人旋翼机当前速度在圆弧径向的分量,规定侧偏速度远离圆弧航线为正。侧偏距离d和侧偏速度Vd的计算式分别为
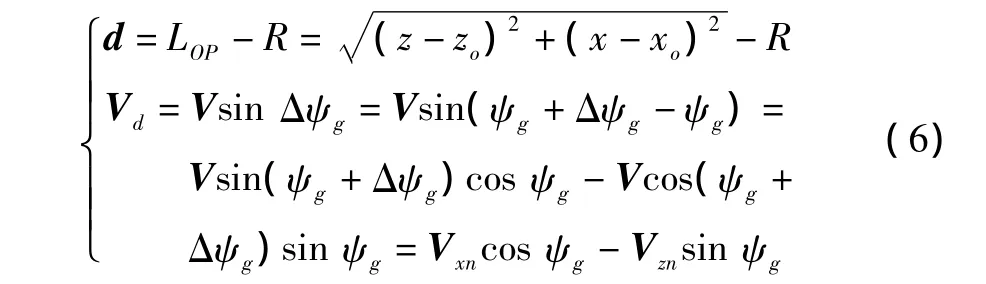
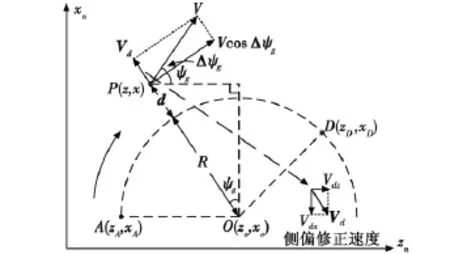
图4 侧偏修正Fig.4 Lateral aberrancy tuning
旋翼机在飞行方式上与常规飞机类似,要求机体轴与速度轴尽量保持一致以减小或消除侧滑。当旋翼机在航迹上出现侧偏时,一方面应操纵桨盘横滚使机体向航迹侧倾,另一方面相应调整航向,尽量减小或消除侧滑。本文的侧偏修正策略为:根据侧偏距离和侧偏速度,实时解算给出侧偏修正速度,将修正速度在导航坐标系中分解(图4中Vdx与Vdz),再与给定导航控制律(5)叠加,通过矢量计算得出修正后的速度大小与方向,指引航向的修正,使无人旋翼机回到给定圆弧航迹上。由此可得,侧偏修正算法分两步进行:
1)计算无人旋翼机偏离航迹的侧偏距离矢量d和侧偏速度Vd,给出修正速度Vd=k1d+k2Vd,其中k1和k2根据飞机性能参数整定,Vd的方向指向圆弧航线,与圆弧径向一致;
2)分别将侧偏修正速度Vd和指令速度Vg分解到导航坐标系,再分别相加作为速度控制回路的指令信号,Vd在导航坐标系的分量为

综上分析,修正后的转弯飞行导航控制律为
4 导航控制模式整合
本文研究的无人旋翼机固定高度盘旋导航控制包括平面导航和高度导航两个部分,因此需要对全部控制回路,包括高度控制回路、速度控制回路和航向控制回路进行整合,而不是简单的“综合”,是为了表达合三为一的思想,将相互之间存在耦合的控制回路合为一个整体,而不是简单的拼凑,从而使控制模式更加科学合理。
高度导航是由导航控制系统根据高度传感器测量的高度值与给定高度比较,产生控制量操纵发动机推力和桨盘俯仰以保持高度。无人旋翼机高度主要依靠旋翼拉力在竖直方向上的分力与重力的平衡关系来控制,而旋翼拉力取决于桨盘迎角与前飞速度。当飞机在盘旋过程中受扰动或横侧向耦合等因素导致高度改变,应及时操纵桨盘迎角改变旋翼拉力在竖直方向上的分力,而改变桨盘迎角也改变了旋翼拉力在前飞速度方向上的分力,若发动机推力未及时改变,则速度方向上的合力就发生了改变,导致前飞速度改变,反过来又改变了旋翼拉力,故在纵向平面内,发动机应与桨盘联动操作,使旋翼获得的拉力在竖直及前飞速度方向上的分力分别与飞机重力及发动机推力平衡,以保持高度及前飞速度稳定。
平面导航要求无人旋翼机在固定高度平面内对圆弧航迹能达到较好的跟踪效果,要求旋翼机能够按照给定航向,使机体轴与圆弧切线保持一致,通过协调转弯控制消除侧滑使速度轴与机体轴保持一致。当受到扰动飞机偏离航迹时,根据当前位置与速度矢量,依据式(6)计算侧偏修正,再与当前速度矢量叠加给出横侧量修正量,使飞机回到预定航迹。综上所述,给出无人旋翼机固定高度盘旋导航控制及高度控制策略如图5所示。
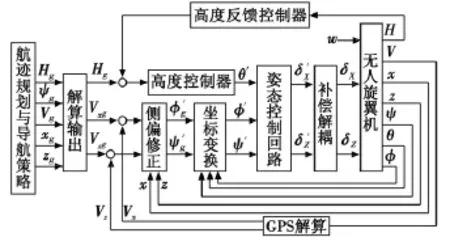
图5 盘旋导航策略Fig.5 Circle navigating strategy
本文研究的无人旋翼机固定高度盘旋导航,在高度导航部分要求高度跟踪与速度跟踪,平面导航部分要求航向跟踪、位置跟踪与速度跟踪,即包含了5个给定量 Hg、Vg、ψg、xg及 zg,如图 5 所示,其中航向给定 ψg和位置给定(zg,xg)随着圆周角呈周期变化。给定量经解算输出后转化为在导航坐标系中的分量,与当前速度比较,结合当前位置(z,x),经过侧偏修正后给出航向给定量。以上计算过程均是在导航坐标系中解算的,通过坐标变换转移到机体坐标系内,再经过姿态控制回路给出操纵量。传统的导航控制策略,在信号进入位置回路前,先从导航坐标系转换到机体坐标系,传感器返回信号时再从机体坐标系转换回导航坐标系。本文通过GPS解算测出飞机在导航坐标系中的当前速度,通过反馈比较修正后再在速度控制回路内进行坐标系转换,仅需一次转换,使控制算法更加简洁。通过姿态控制回路给出纵向操纵量和横侧向操纵量,其中包含发动机油门舵 δT和桨盘俯仰舵 δe,包含方向舵δr和桨盘横滚舵δa,再经过补偿解耦得到最终的操纵量。
5 地面半实物仿真
本文无人旋翼机重150 kg,机身长4.3 m,单片桨叶长4 m。令文中导航坐标系zn向为东向,xn向为北向。飞机当前位置为导航坐标系原点,沿正北方向起飞,以3.5 m/s爬升率爬升到350 m的高度,再以14 m/s的速度平直前飞。当飞行到位置(0,2100 m)时,绕点(200 m,2100 m)作半径为200 m的盘旋,盘旋一周后,继续向正北方向平直飞,整个盘旋过程高度保持在350 m。仿真曲线如图6、图7所示。
图6和图7为盘旋过程飞行航迹,图8中飞行高度的指令以斜坡形式给出。
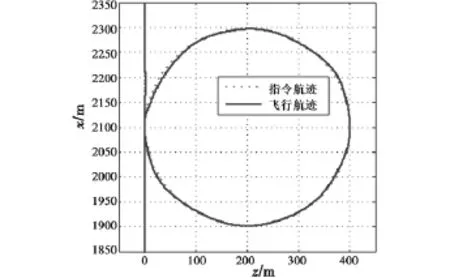
图6 平面航迹Fig.6 Plane flight path
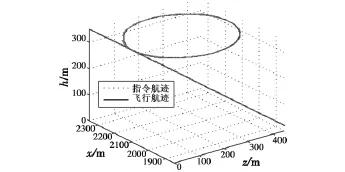
图7 三维航迹Fig.7 Three- dimensional flight path
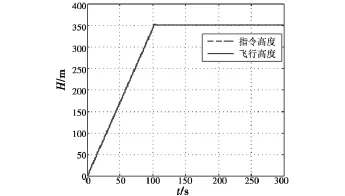
图8 飞行高度Fig.8 Flight height
旋翼机进入盘旋状态后,线速度为14 m/s,盘旋半径为200 m,则盘旋周期为:T=≐89.76 s。
盘旋一周,航向角以匀角速率改变360°,则航向角速率为:r=≐4.01(°)/s。
盘旋过程中,北向速度按余弦规律变化,东向速度呈正弦周期变化,从图9~图11仿真结果来看,各输出量均能较好地跟踪给定指令。
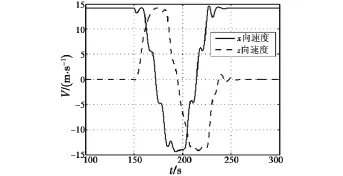
图9 速度Fig.9 Velocity
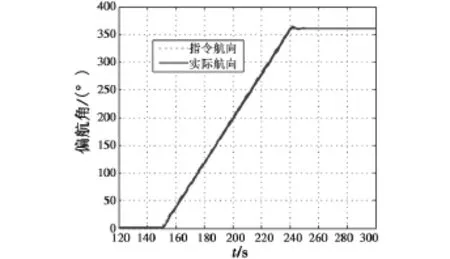
图10 偏航角Fig.10 Yaw
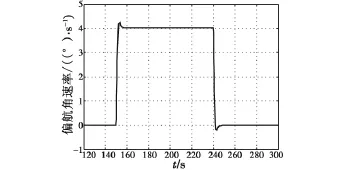
图11 偏航角速率Fig.11 Yaw rate
6 结语
自转式旋翼机是一种古老又新兴的飞行器,其飞行特征有与直升机及固定翼飞机相似的地方,也有其独特的地方,横侧向控制是飞行控制不可缺少的一部分,因此开展无人旋翼转弯飞行导航控制研究具有重要意义。本文通过对某型无人旋翼机特性进行了分析,提出了在转弯过程中运用侧向偏移和侧偏速度进行侧偏修正,达到良好的航迹跟踪效果,半物理仿真也说明了导航策略的有效性。
[1]陆洋,李建波,朱清华.自转旋翼机配平及操纵响应特性[J].南京航空航天大学学报,2008,40(5):577-578.
[2]LEISHMAN J G.Development of the autogyro:A technical perspective[J].Journal of Aircraft,2004,41(4):765-781.
[3]王焕瑾,高正.自转旋翼的气动优势和稳定转速[J].航空学报,2001,22(4):337-338.
[4]朱清华.旋翼机总体设计的几个问题[J].航空科学技术,2006,5:29-30.
[5]SARIPALLI S,SUKHATME G S,MONTGOMERY J F.An experimental study of the autonomous helicopter landing problem[J].Springer Tracts in Advanced Robotics,2003(5):466-475.
[6]张学军.直升机稳定转弯飞行中的运动学问题研究[J].海军航空工程学院学报,2006,21(2):234-240.
[7]邢小军,闫建国.直升机全包线协调转弯控制律设计及仿真[J].飞行力学,2011,29(1):42-45.
[8]杨俊鹏,祝小平.无人机倾斜转弯非线性飞行控制系统设计[J].兵工学报,2009,30(11):1504-1509.
[9]宫林.无人机起飞与降落的控制技术[D].南京:南京航空航天大学,2009.
[10]朱清华.自转旋翼飞行器总体设计关键技术研究[D].南京:南京航空航天大学,2007.
[11]黄一敏,郭锁凤.直升机控制系统的内/外回路设计概念及其应用[J].南京航空航天大学学报,1999,31(3):287-292.
