国外航姿器的技术现状分析
2012-07-02刘智平
刘智平,谭 芳
(西安工业大学 计算机学院,西安 710032)
航向姿态参考系统的功能是为航行器提供姿态角信息,最早且最简单的航姿器就是指南针,现在的航姿器的功能包括提供三轴的角速率、航向角、俯仰角和横滚角信息[1]。
国外从事MEMS 惯性期间的研究机构主要有美国的MIT、CSDL、加州大学、加州理工学院的JPL、斯坦福大学、明尼苏达州立大学、霍尼韦尔公司、BEI 公司、Crossbow 公司、AD 公司,分布在其它国家的有日本、加拿大、德国、法国、英国、俄罗斯、中国。在微观性技术领域,美国的CSDL、斯坦福大学和JPL 一直引领世界潮流。
国内低成本的航姿器的研究和开发也是基于MEMS 惯性传感器,其中,中航618 所的朱少华等人提出了基于MEMS 器件的大气航姿系统的设计思路和算法,样机进行了车载试验的验证。在其提出的思路中,不是仅靠AHRS 来确定航姿的,而是参考了加速度计的输出信息来估算倾角偏差。为了进一步应用在高机动载体上,参考了大气数据系统的输出[2]。这就比单纯利用GPS 数据修正姿态好许多,至少在机动载体上。空军工程大学工程学院的黄国荣等人提出了基于MEMS 器件的军用航姿系统的设计思路和算法,所选用的器件为AD 公司的ADIS16405 型IMU,该IMU 包括三个陀螺、三个加速度计、三个磁力计和温度传感器。以ARM 处理器LPC2114 作为导航计算机,选用的是等效旋转矢量算法和卡尔曼滤波,姿态误差在1 度之内[3]。系统的硬件包括:IMU、GPS-OEM 板、ARM 计算机和各种接口。
本文主要研究美国、法国、德国和荷兰等国在航姿器技术方面的现状和发展趋势分析,旨在为我国在此领域的技术进步有所参考。
1 国外航姿器的技术现状
荷兰的Xsens 公司的代号为MTI -G 的航姿器是一款体积小、重量轻的而且是六自由度的航姿器,它包括MEMS IMU、GPS、磁强计、静态气压计、温度传感器,是一典型的数据融合系统,能够提供校正过的地磁数据、姿态数据、位置数据和速度数据。它已应用在空中的飞行器上、地面的车辆上,特别适合应用在持续、长时间加速运动的载体上。其数据更新速率为120 赫兹,计算机选用DSP,主要亮点就是其数据融合算法、组合导航算法、误差补偿算法[4]。
技术指标如下:AHRS 的横滚和俯仰精度是0.5 度,航向精度是1 度,俯仰测量范围为±90°,横滚和航向的测量范围是±180°,线加速度的测量范围是±50 m/s2,角速度的测量范围是±300°/s,磁场的测量范围是±750 mGauss,GPS 正常时的定位精度2.5 m,初始对准误差为0.1 度(三轴),体积为58 ×58 ×33 mm3,质量为68 g,功耗最大值为900 毫瓦,最大工作高度18 km,最大速度为515 m/s,数据输出采用RS-232 接口和USB 接口,另配工具箱,可以实时下载数据和储存数据,也可直接利用MATLAB、EXCEL 等软件进行数据的后续处理,产品外观如图1所示。

图1 MTI-G 的外观
美国的MEMSIC 公司的航姿器有AHRS440、AHRS500GA、AHRS510 等型号,其中,AHRS500GA(图2)已应用于超过500 架的固定翼飞机和旋转翼飞机,是一款标准的基于MEMS 陀螺和加速度计的单独姿态航向参考系统,功耗低于4 瓦,具有自检测功能,可靠性高。具有接收外部磁强计数据和速度数据的RS -422 接口,通过RS -232 接口对外输出3 个姿态角、角速度和线加速度。航向精度为2 度,俯仰和横滚的精度为1 度,角速率的测量范围是±200°/s,线加速度的测量范围是±10 g,加计的零偏为15 mg,总质量为1.6 kg[5]。

图2 AHRS500GA
美国的霍尼韦尔公司的航姿器也是实现了系列化,其航姿器AH-2100(图3)已经大批量应用于商业飞机、坦克、军用教练机和直升机上。
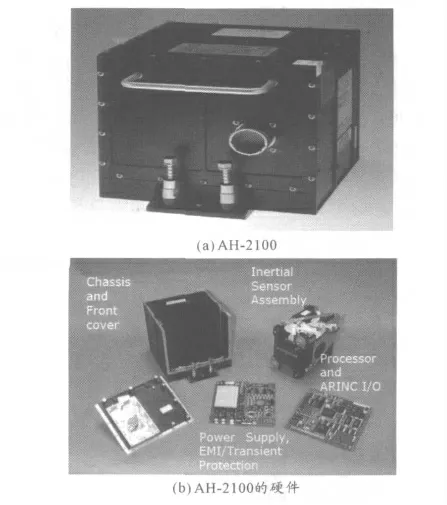
图3 AH-2100
它的特点如下:
1)能够提供极其稳定的精确磁航向;
2)可在高纬度地区工作;
3)MTBF 大于25 000 小时;
4)自动模态控制逻辑;
5)无需罗经控制器;
6)被动式冷却;
7)ARINC-615 接口便于软件更新;
8)分时操作系统软件和芯片;
9)质量为4. 8 kg,功耗为20 W,体积为6. 5 × 6. 4 ×6.4inch3,MTBF 大于25 000 小时。
AH-2100 采用了环形激光陀螺GG1320,加速度计为Q -FLEX QA-950[6]。
美国的Crossbow 公司的AHRS 也是系列化的产品,其中ANC1000 就是一款基于MEMS 传感器的电路板级AHRS 系统,可集成于组合导航、制导系统中,直径2.5 英寸,厚度为0.75 英寸,其上有MEMS 陀螺、加速度计、DSP 芯片、嵌入式卡尔曼滤波软件,具有接受外部数据的接口,可接收GPS 信号、磁强计信号[7]。
ANC1000(图4)的典型应用场合就是无人机、机器人、地面车辆的导航制导系统以及运动稳定平台。
其关键特征包括:
1)单板级高度和航向解;
2)高可靠性的MEMS 传感器;
3)精度最差为0.2 度;
4)体积为3.7 立方英寸;
5)功耗1.8 W;
6)质量为27 g;
7)外部的磁强计和GPS 接口;
8)对振动极不敏感;
9)数字接口为RS-422。
技术指标包括:
1)航向范围为±180°,精度为0.75 度;
2)横滚范围为±180°,精度为0.2 度;
3)俯仰范围为±90°,精度为0.2 度;
4)角速度的测量范围为±300°/s,带宽为25 Hz;
5)线加速度的测量范围为±4 g,加计的零偏为4 mg,带宽为25 Hz。

图4 ANC1000
美国的Northrop-Grumman 公司为海军舰艇研制的AHRS 也实现了系列化。以MK27F 为例,其外观如图5 所示[8]。
它采用了光纤陀螺,姿态输出速率为60 Hz 或400 Hz。
具体的性能指标如下:
1)航向精度0.35 度,俯仰角和横滚角的精度为0.1 度;
2)MTBF 大于9 000 小时;
3)粗对准时间短于25 min;
4)尺寸为31.2 ×34.8 ×41.8cm3;
5)质量为25 kg;
6)功耗50 W。

图5 MK27F
德国的iMAR 公司除了惯导系统的研制和惯性传感器研制外,AHRS 也是其主要产品之一。该公司研制的航姿器iVRUSNQ,它包括三个MEMS 陀螺和三个伺服加速度计,用于测量载体的角速度和线速度或者其增量,采用RS-232 接口,同时也可外接GPS 数据和磁强计的数据,俯仰和航向精度为0.2 度,在载体机动时,俯仰和航向的精度降到2 度,三个轴的对准精度为3.4 角分[9]。
该产品的外观如图6 所示。
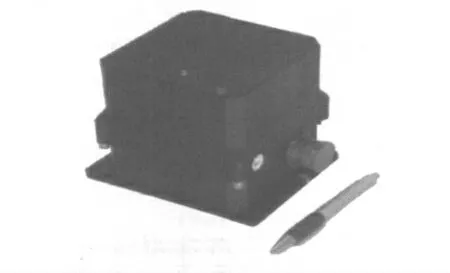
图6 iVRU-SNQ
其角度分辨率为0.01 度,质量为1.8 kg,体积为152 ×127×130 mm3,RS-232 接口,可应用于海军舰艇、直升机、固定翼飞机和地面车辆的航向姿态参考系统。
法国的SAGEM 公司为海军舰艇生产了一款集AHRS 和导航系统为一体的型号为SIGMA 40 的产品,外观如图7 所示[10]。

图7 SIGMA 40
该款产品主要为水面舰艇设计,满足军方的要求,完全具有自主知识产权。既可用于导航,也可用于武器系统的姿态稳定。它采用法国最成熟的环形激光陀螺组成捷联惯导系统,具有自动标定功能。经过海军的实验验证,坚固且紧凑。
它能提供的数据包括:航向角、俯仰角、横滚角、体轴角速率、位置、水平方向的速度和加速度、垂直方向的速度和加速度。
技术指标如下:
1)尺寸为285 ×225 ×410mm3,质量为24 kg;
2)功耗小于70 W;
3)MTBF 大于35 000 小时;
4)8个RS422 数字接口;
5)航向误差小于3 角分,俯仰和横滚小于1 角分;
6)自主导航8 h 的位置误差小于1 海里,资助导航24 h 的位置误差小于1.5 海里;
7)通电后6 min 输出导航数据;
8)通电后20 min 输出全部导航数据;
其他国家的AHRS 的介绍在此略去。
2 发展趋势预测
从上述国家的航姿器的性能指标、结构组成上,我们可以大致做出如下的趋势预测:
1)低成本化。
2)高精度化。
3)高度集成化:将IMU、磁强计、GPS、里程计、高度表的数据融合在一起。
4)应用范围不断扩大:从目前的军用市场将拓展到民用市场。
3 结论
本文的研究工作是在大量地阅读了国外的相关企业的网页后,针对其航向姿态参考系统方面的信息进行收集和整理,主要列举了美国、德国、法国和荷兰的公司的航姿器的性能指标、图片和主要特征介绍,最后以此为基础进行了AHRS 的发展趋势的预测,旨在为我国在此领域的技术进步提供参考。
[1]张丽杰,常佶. 微小型航姿测量系统及其数据融合方法[J].中国惯性技术学报,2011,19(3):307 -312.
[2]朱少华,汪芳.一种适用于高动态制导飞行的大气航姿系统算法[J].弹箭与制导学报,2011,31(4):14 -16.
[3]杜继永,黄国荣.基于低成本MEMS 器件的捷联航姿系统设计[J].传感技术学报,2010,23(11):1662 -1666.
