点式列车自动保护模式下的紧急停车、跳停缺陷及解决方法
2012-01-16黄小林
黄小林
(西安地下铁道有限责任公司,710016,西安∥助理工程师)
7·23甬温线动车事故后,上海轨道交通10号线又发生9·27列车追尾事故,公共交通的安全性已成为一件敏感的事。面对国内多样化的轨道交通信号系统,有必要研究系统缺陷并提前制定具体的应对措施。浙大网新信号系统在国内运用广泛,目前已在成都、沈阳、西安地铁的首条线路投入使用,郑州、杭州等国内多个城市的地铁也将使用该信号系统。已开通线路在运营时,信号系统仅提供点式ATP(列车自动保护),因此有必要研究点式ATP(IATP)模式下的缺陷。
1 西安地铁2号线信号系统
西安地铁2号线正线信号系统由浙大网新公司提供,包括基于无线通信技术的移动闭塞制式列车自动控制(CBTC)系统,同时提供在连续式ATP功能丧失情况下的点式ATP和联锁控制级列车防护系统。信号系统包括ATP、计算机联锁(CBI)、列车自动运行(ATO)、列车自动监视(ATS)等4个子系统。
CBTC是连续式的车地通信移动闭塞,主要由中央 ATS系统、区域控制器(ZC)、联锁控制器(MLK)、车站远程ATS工作站和数据通信子系统(DCS)等组成(见图1)。在CBTC模式下,车站按压紧急停车按钮时,MLK将采集到的信息传递至ZC,ZC通过DCS控制列车紧急制动;在ATS设备操作跳停命令时,指令将传递至ZC,ZC通过DCS前移列车的移动授权,控制列车在车站不停车通过。
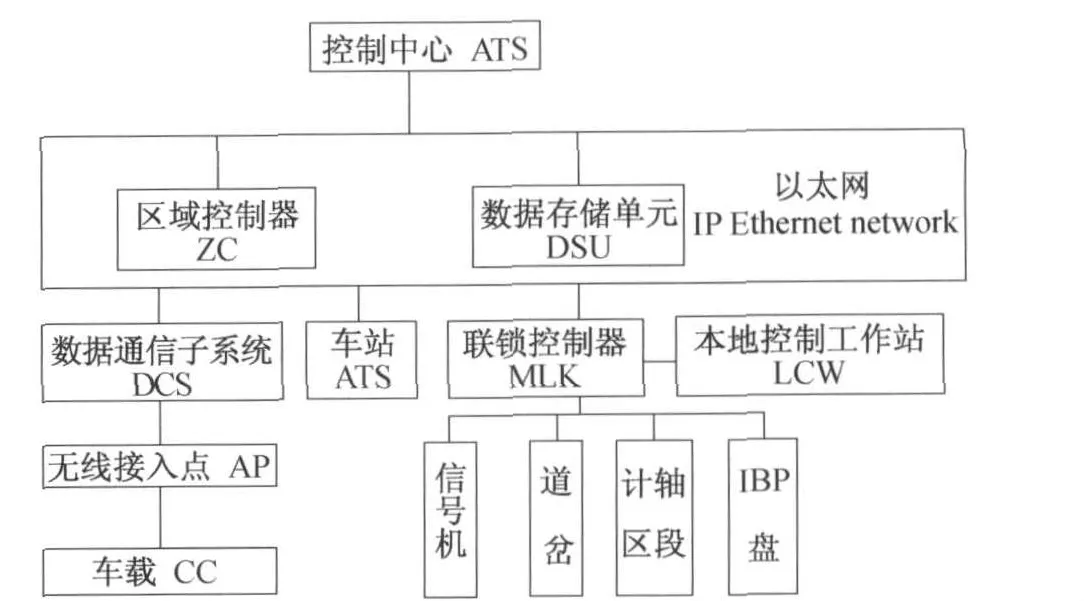
图1 信号系统配置图
点式ATP是CBTC的降级模式,仅具备信号系统的部分功能。点式ATP控制,列车驾驶模式为IATP,不支持ATO,由于 ZC及 DCS未启用,车站的紧急停车不能触发列车紧急制动,ATS的扣车、放行、跳停功能也无法实现。
2 点式ATP模式下紧急停车、跳停缺陷及解决方法
2.1 点式ATP原理
在点式ATP模式下,列车主要靠线路上安装的静态信标、动态信标以IATP驾驶模式运行。如图2,在列车车载控制器(CC)良好的前提下,首先,列车CC通过检测静态信标获取列车定位,列车方可从RM(限速25 km/h的人工驾驶)或NRM(非限制人工驾驶)模式转换为IATP模式;其次,列车压上动态信标且该信号机(S1)开放绿灯,动态信标发送允许通过信号至车载CC,车载CC结合电子地图信息,计算生成一次制动模式曲线,列车信号屏显示目标距离和推荐速度,驾驶员即可按IATP模式人工驾驶。
在点式ATP模式下,车载CC与静、动态信标车-地通信的时机为:列车跨越地面信标时,在车-地间两线圈耦合瞬间,利用电感耦合激磁震荡原理产生电能,触发信标发射电路工作,将信标中存储的信息循环发送出去,直至列车离去而停止发送(电感耦合断开,电能耗尽)。
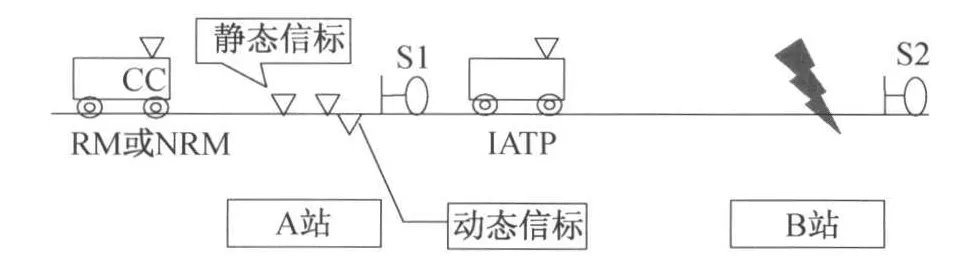
图2 点式ATP工作原理
2.2 紧急停车的缺陷及解决方法
2.2.1 在点式ATP模式下,紧急停车仅影响信号机的开放
在地铁车站站台两侧及车站控制室IBP(紧急后备盘)都设有紧急停车按钮。该按钮的功能是在紧急情况下触发列车紧急制动,故障导向安全。在点式ATP模式下,车站的紧急停车按钮按下时,紧急停车继电器落下,MLK采集到该信息后,实现关闭该车站进、出站信号机的输出控制。即B站按压紧急停车按钮,S1、S2信号机均不能开放,已经开放的绿灯也会立即关闭。
在点式ATP模式下,车载CC只有在未越过信号机时才能接收到静态、动态信标发送的数据,若列车以IATP模式已越过信号机时,紧急停车按钮将无法让列车停车。以图2为例:
(1)若列车未进入A站——B站区间或在B站站台停车,B站按压紧急停车按钮,S1、S2信号机立即显示红灯,动态信标将发送禁止通过信息,列车在A或B站不能发车。
(2)若列车以IATP模式已越过S1或S2信号机,此时按压B站的紧急停车按钮,由于列车已跨越信号机前的动态信标,车载CC接收不到动态信标发送的禁止通过信息,列车仍然按照已生成的制动模式曲线运行至下一信号机前。若B站突发影响行车紧急事件时,点式ATP控制系统不能触发列车紧急制动,存在较大的安全风险。
因此,在点式ATP模式下,当列车未进入前一站至本站区间或列车在本站站台停车,本站紧急停车按钮通过关闭进出站信号机能起到安全防护作用,但只要列车越过前一站或本站的信号机,紧急停车按钮将不具备防护功能。
2.2.2 解决方法
(1)在运营车站的站台安装屏蔽门,保障列车进出站及乘客的安全。
(2)车站人员准备好信号灯或信号旗等停车显示备品,当发生紧急情况影响行车时,车站的站台人员立即在司机容易瞭望处显示停车信号。车控室内值班人员按压紧急停车按钮,并立即汇报行车调度。
(3)行车调度接到车站的紧急汇报或发现车站紧急停车的信号报警后,第一时间用无线调度电台通知受影响列车停车。
(4)地铁司机在进出站区域须加强瞭望,注意地面信号的显示状态,发现异常时立即采取紧急停车措施;在站台作业时注意乘客上下情况,防止夹人夹物动车。
2.3 跳停的缺陷及解决方法
2.3.1 在点式ATP模式下,不能以IATP驾驶模式越站
在中央ATS操作系统上设置有“跳停下一站”命令,当列车晚点、列车故障等原因需要行车调整或者火灾紧急情况需组织列车在车站不停车通过时,可使用该命令。
在点式ATP模式下,信号系统的跳停功能不能取消默认停车点,不能控制列车以IATP模式越站。这是因为列车车载CC接收的信标信息仅提供一段进路条件信息:列车接收到动态信标的允许行车信息后,仅能按线路条件生成一次制动模式曲线,指导列车在进路终端信号机前停车。即以IATP模式驾驶的列车须在每一车站对标停车,才能获得至下一站的动态信息。因此,若需列车在车站不停车通过,须由司机提前将IATP模式转换为RM或NRM模式。在IATP驾驶模式转换为RM或NRM模式时,系统为保证安全,须当列车停车后方可允许转换。因人工模式不受信号系统保护,组织列车越站时存在一定的安全隐患,在行车密度及客流较大时尤为突出。
2.3.2 解决方法
(1)行车调度尽量提前通知司机并排列越站列车进路。列车需在车站不停车折返时,行车调度在列车折返前即可提前布置,保证司机能及时获取信息,在前方站动车时提前转换驾驶模式以避免造成区间停车。
(2)根据列车间隔谨慎选择驾驶模式。行车密度大时建议采用RM模式,此模式下列车最高运行速度为25 km/h,列车运行超过该固定限速时,车载设备对列车实施紧急制动。
(3)加强行车调度、车站、司机岗位的联动互控,保证列车能安全越站。行车调度及车站在信号终端上监控越站列车的位置及与前后列车的间隔,越站列车至少与前行列车保持一个站台,一个区间的间隔。司机严格按照地面信号显示及调度命令驾驶列车。
3 结语
点式ATP实际上是信号系统的一种降级模式,如果长期使用该信号模式,则存在一定的系统风险。运营单位需提前制定详细的防范措施,促进地铁调度、车站及司机三个行车岗位的联动,以应对点式ATP模式下紧急停车仅影响信号机的开放及列车不能以IATP驾驶模式越站的缺陷,保证轨道交通运营时的行车安全,提高运输服务质量。
[1]陈迎竹.上海地铁引发的安全担忧[EB/OL].(2011-10-01)[2011 -12-20].http:∥news.sina.com.cn/c/2011 -10 -01/080723248742.shtml.
[2]XDY/QT-XC -01.02(V2.1)西安地铁行车组织规则[S].西安:西安市地下铁道总公司,2010.
[3]刘纪检,黄贵荣,李涛.终止站停命令的缺陷及解决方法[J].都市快轨交通,2007,20(5):45.
[4]平柳琼.点式ATP系统在上海五号线的应用[J].城市公用事业,2010(5):35.
[5]肖培龙.基于信标传输技术的列车控制系统[J].城市轨道交通研究,2011(8):119.
