中国首次交会对接任务的技术成就和展望
2011-12-27尚志
尚志
(中国空间技术研究院,北京 100094)
1 引言
国际载人航天目前正处于转变时期,纵观国际载人航天的发展历程,我国载人航天工程按照“三步走”的发展战略进行实施。第一步为“以载人飞船起步,发射几艘无人试验飞船和一艘有人飞船”解决天地往返的运输工具问题;第二步为“研制和发射空间实验室,尽早建成完整配套的空间站工程大系统,实现一定规模的空间应用”;第三步为“建造长期有人照料的大型空间站”。本着“自主创新、重点跨越、支持发展、引领未来”的指导思想,认真总结国际载人航天发展的经验,结合我国政治、经济、国防及科学技术等各个方面对载人航天长远任务需求,顺应世界载人航天发展的趋势,探索出一条符合我国国情、目标长远、可持续发展的道路。
2004年12月中央批准启动我国载人航天第二步任务,并明确第二步任务重点放在载人航天器交会对接和航天员空间活动等重大技术突破上。神舟七号飞船出舱活动已经突破和基本掌握了航天员空间活动技术。天宫一号目标飞行器将分别与神舟八号、神舟九号和神舟十号3艘载人飞船执行无人或载人交会对接任务,以突破航天器交会对接技术。
2011年11月,神舟八号载人飞船和天宫一号目标飞行器完成了交会对接、组合体飞行并分离后安全返回地面,标志着我国首次交会对接任务圆满完成。
本文系统介绍了天宫一号目标飞行器和神舟八号载人飞船的研制历程、主要技术成就、与国外技术的比较、任务意义和后续发展展望。
2 主要研制历程及交会对接任务过程概况
天宫一号目标飞行器和神舟八号载人飞船的研制历时6年多时间,先后经历了方案设计、初样研制和正样研制阶段,完成了规定的700余项试验。
2.1 主要研制历程
以下分别介绍天宫一号目标飞行器和神舟八号载人飞船的主要研制历程。
1)天宫一号目标飞行器主要研制历程
2006年12月,完成了方案设计,转入初样研制阶段;
2009年5月,完成了初样结构/热控器的总装和大型试验;
2009年7月,完成了初样电性器总装、电性能测试、电磁兼容性(EMC)测试和磁试验;
2009年12月,完成了初样研制,转入正样研制阶段;
2011年5月,完成了正样器总装、电测、大型试验、软件落焊及回归测试;
2011年6月,通过了正样出厂评审;
2011年9月,完成了发射场任务,由长征-2F火箭运载升空;
2011年10月,完成了在轨测试;
2011年11月,完成了降轨调相、转倒飞以及交会对接前设置,在343km 高度轨道等候交会对接。
2)神舟八号载人飞船主要研制历程
2006年12月,完成了方案设计,转入初样研制阶段;
2008年12月,完成了初样结构/热控船的总装和大型试验;
2009年9月,完成了初样电性船总装、电性能测试、EMC测试和磁试验;
2010年4月,完成了初样研制,转入正样研制阶段;
2011年6月,完成了正样船总装、电测、大型试验、软件落焊及回归测试;
2011年8月,通过了正样出厂评审;
2011年11月,完成了发射场任务,由长征-2F火箭运载升空,变轨后进入343km 高度轨道。
2.2 交会对接任务过程概况
神舟八号载人飞船与天宫一号目标飞行器的空间交会对接任务飞行过程需经历5个阶段:(1)远距离导引段,两航天器都入轨后,通过地面测控站的引导,建立稳定的通信链路,自主导航;(2)自主控制段,经过寻的、接近和平移靠拢3个过程,神舟八号载人飞船自主导航至与天宫一号目标飞行器接触;(3)对接段,从对接机构接触开始,完成捕获、缓冲、拉近和锁紧4个过程,最终实现两航天器刚性连接,形成组合体;(4)组合体飞行段,由天宫一号目标飞行器负责组合体飞行控制,神舟八号载人飞船处于停靠状态,择机进行并完成第二次交会对接试验;(5)分离撤离段,两航天器再次分离,神舟八号载人飞船撤离到安全距离,交会对接试验完成。
整个交会对接过程需保证接合平稳,避免因剧烈摇晃而影响两在轨航天器的姿态。
3 我国首次交会对接任务取得的主要技术成就
我国自20世纪90年代,开始进行载人航天器空间段设计技术的论证,并对交会对接总体技术和关键技术进行攻关,先后完成了飞船与目标飞行器交会对接方案设计、飞船和目标飞行器构成的载人航天器空间段系统的交会对接飞行方案设计,并攻克了空间交会对接技术、组合体控制与管理技术、低轨长寿命载人航天器设计技术和载人航天器组批研制技术。
3.1 载人航天器空间段设计技术
交会对接飞行任务需要天宫一号目标飞行器和神舟八号、神舟九号、神舟十号载人飞船通过4次发射在轨组合飞行来完成,这也是区别于以往载人航天飞行任务和卫星飞行任务的重要方面,需要从载人航天器空间段层面来开展设计。
载人航天器空间段设计,负责组织分析工程总体下达的交会对接任务的技术要求;“空间段”飞行任务分析和方案设计;研究目标飞行器和载人飞船间联合飞行或运营管理技术;协调两航天器指标和接口;确定联合试验、仿真和测试项目。
3.2 空间交会对接技术
目标飞行器在飞船发射前1天进入交会对接轨道,等待飞船进行交会对接;在飞船入轨后,由飞船完成远程导引控制;飞船和目标飞行器相对距离小于100km 后,利用空空通信和交会测量设备进行自主控制实现船器空间交会,最后通过两航天器前端配置的主被动对接机构完成对接。
1)远距离导引技术[1]
载人飞船的远距离导引段从收到“船箭分离”信号起,至转入自主控制点止,通过轨道机动提高飞船轨道高度,调整两航天器的相位差,缩短相对距离;同时消除入轨误差造成的两航天器轨道面偏差,最终使载人飞船轨道终端条件满足转入自主控制的条件。
2)两航天器间的相对测量与通信技术
载人飞船配置了多种交会测量设备,用于交会自主控制过程的相对测量。包括微波雷达、激光雷达、CCD 光学成像敏感器和电视摄像机。
载人飞船与目标航天器交会对接和组合体飞行中,有空空通信无线信息传输和对接总线有线信息传输两条链路,分别用于两航天器对接前后信息通信。
3)两航天器对接与分离技术
载人飞船与目标飞行器采用导向板内翻的异体同构周边式对接机构,载人飞船为主动端,目标飞行器为被动端,两对接机构共同实现两航天器的捕获、缓冲、锁紧、连接以及解锁、分离。两航天器对接锁的主、被动锁钩上均安装爆炸螺栓,在紧急情况下,可引爆对接锁上的火工品实现两航天器分离。
3.3 组合体管理技术
组合体是从“目标飞行器与载人飞船完成刚性对接、目标飞行器控制组合体姿态启控”至“组合体分离开始、目标飞行器控制组合体停控”的船器组合体。组合体飞行期间,以目标飞行器为主进行组合体的控制与管理,飞船处于停靠状态,共同实现组合体载人环境控制、姿态与轨道控制的功能。
1)大质量、大惯量、大柔性、变结构姿控技术
为解决组合体模态密集、且在大型转动挠性外伸结构引起的动力学耦合情况下保持姿态稳定的难题,目标飞行器设计单框架控制力矩陀螺进行姿态控制,使用磁力矩器完成对控制力矩陀螺系统卸载,满足组合体姿态控制要求,同时为空间站组合体姿态控制方案进行在轨验证。
2)热负荷动态变化的组合体载人环境控制技术
天宫一号的载人环境控制设计需满足自主运行、1人飞行、2人飞行和3人飞行等工况,各工况的密封舱内热负荷动态变化大。目标飞行器采用通风换热为主、被动热控为辅的环热控一体化设计,通过调节辐射器混合出口温度,实现外回路换热能力调节,满足密封舱温湿度的要求。
3.4 低轨长寿命载人航天器设计技术
天宫一号目标飞行器是我国首个在轨运行时间为2年的低轨长寿命载人航天器,飞行期间运行在340~400km 的近圆轨道,需经受太阳辐射、高层大气、地球磁场、失重、真空、高能带电粒子、电离层、微流星体及空间碎片等低轨空间环境。天宫一号开展的低轨长寿命载人航天器设计与验证主要包括:
(1)对舱外材料/涂层、太阳电池翼、对接锁系等性能参数受原子氧、紫外线或真空等低轨环境影响,对性能参数逐步退化的产品进行可靠性及寿命试验,验证对低轨环境的适应能力;
(2)对影响目标飞行器控制、环控热控、测控、能源关键功能的机电产品从轴承设计、润滑设计等开展长寿命设计,安排专项寿命试验进行验证,同时从系统设计层面提高风机、泵、陀螺等产品的冗余度,采用冷备份设计提高平台寿命;
(3)对电子设备注重芯片选型,采用双机冷备份的设计方式保证整机性能不受低轨环境影响,采用加速寿命试验验证是否满足寿命要求。
3.5 载人航天器组批研制体系
为适应交会对接任务小批量、发射密集程度高的特点,建立载人航天器组批研制、生产与测试的体系。
(1)通过梳理和确定适应批量化生产要求的载人航天器研制计划流程和技术流程,培育并掌握批量化生产的总装工艺、测试和试验等技术,固化技术状态、接口关系,建立适应批量化生产要求的技术体系;
(2)通过规划、调整、补充建设适应载人航天器总体生产能力的批量化柔性生产线,形成满足发展要求的批量化生产保障能力;
(3)通过对现有管理模式的调整,建立适应批量化生产要求,涵盖计划、质量、成本、物资、人力资源、信息沟通以及风险控制等要素的管理体系,形成适应批量化生产要求的管理模式,提升科学管理能力。
4 国内外交会对接技术比较[2-6]
1961年4月12日苏联航天员加加林乘东方1号载人飞船上天,标志着载人航天时代的开始。回顾50多年来的发展历程,美国走过的载人航天路线是:由载人飞船到航天飞机再到空间站;俄罗斯走过的载人航天路线是:由载人飞船到空间站再到航天飞机。除美国阿波罗号飞船登月外,美俄两国涉足的载人航天活动领域基本相当,以互相竞赛式的模式发展为主。目前,共有苏联/俄罗斯、美国、欧洲、日本和中国等国家和组织成功实施了空间交会对接,各国的交会对接技术比较见表1。
其中,人控交会对接和自动交会对接的优缺点对比如下。
(1)人工控制的优点:可充分发挥人的智能优势,提高交会对接成功的概率,能对对接过程中的故障进行处置或维修;缺点:航天员的操作负荷大,受空间环境条件(光照)限制。
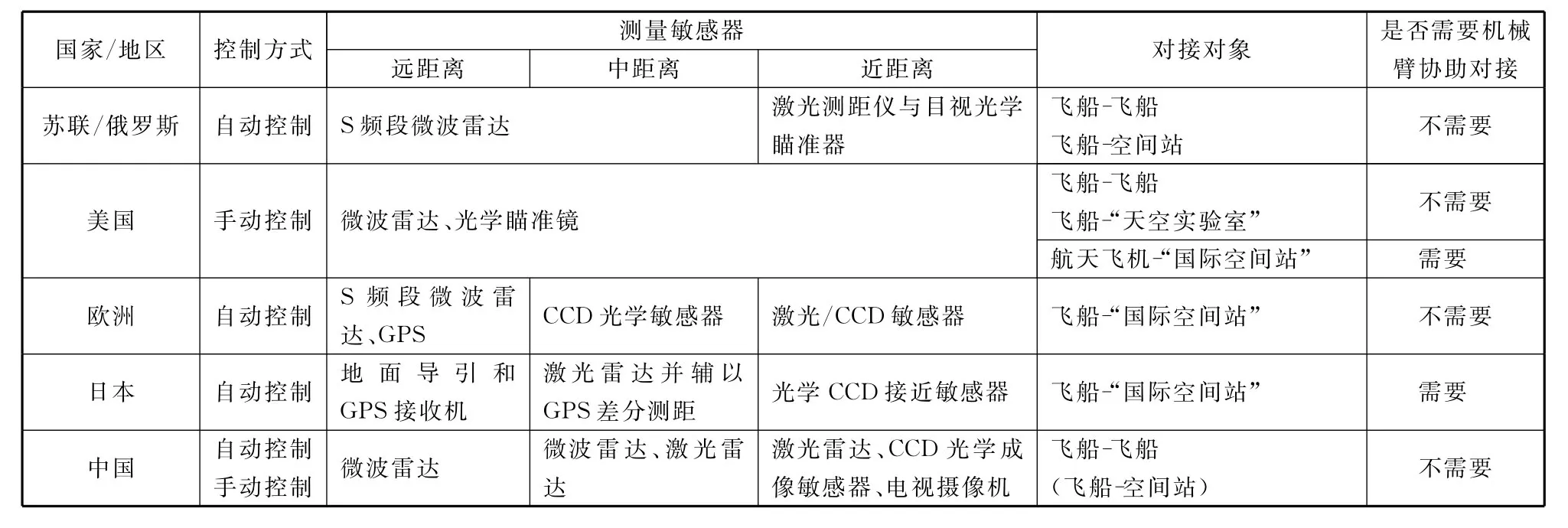
表1 各国的交会对接技术比较Table1 Comparison of rendezvous and docking technology of different countries
(2)自动控制的优点:只依赖自控设备,系统可靠性高,对环境适应性好;缺点:作为安全性措施,需要分布很广的地面站或中继卫星支持。
从上述分析可知,虽然我国交会对接技术发展较晚,但总体水平和航天发达国家相当。我国采取自动控制和手动控制相结合的方案,充分发挥了人控交会对接和自动交会对接的特点,比较好地兼顾了系统可靠性和安全性[7]。
5 我国首次交会对接任务的意义及展望
2011年11月17日,我国首次空间交会对接任务取得圆满成功,其具有的工程、科学及社会意义深远。
1)提升国家威望,产生广泛社会效益
强大政治影响力需要强大的综合国力作后盾,而载人航天,就是衡量国家综合国力的重要标志之一。如果没有高度发达的科学技术和科研能力,如果没有雄厚的经济基础,任何一个国家都是不可能开展载人航天工程的。
通过首次航天器交会对接任务,大大提高了我国的国际地位和国际威望,增强了政治影响力、民族自信心和自豪感,也增强了国家的战略威慑力量。同时广泛鼓舞了青少年的科学热情,为我国航天科技发展吸引了新生力量。
2)带动基础学科发展
完成首次交会对接任务的两个载人航天器——载人飞船与目标飞行器,分别具有可返回、在轨时间长的特点。根据其特点,可搭载空间站技术试验、空间科学试验、空间应用试验和航天医学试验项目。
后续载人航天工程任务必然会牵引更多的科学实验项目,带动相应基础学科的发展。3)推动航天技术持续发展
研制并发射目标飞行器,既作为目标配合突破交会对接技术,又可为空间站积累经验;研制功能完善的载人运输飞船,既可突破交会对接技术,又可满足空间实验室和中小规模空间站的乘员组运输服务需求。
空间实验室和空间站作为航天领域的重要基础设施,将成为我国航天技术发展研究和实验的重要基地。通过开展这些航天高新技术的实验研究和验证,将极大地提高我国航天技术的整体水平。
4)为后续载人航天任务奠定坚实基础
交会对接技术是各国发展载人航天所必须掌握的关键技术。首次交会对接任务的成功,表明我国已掌握了这一关键技术,从而可以向更高的目标前进。
本次交会对接任务的完成,同时还突破和基本掌握了部分空间站关键技术,如:在轨载人航天器整体壁板结构技术,大质量、大惯量、大柔性变结构姿控技术,高电压大功率低轨长寿命电源技术,组合体管理技术,长期在轨飞行空间碎片防护技术,长期在轨生命保障核心技术,长期在轨运动机构技术,金属膜盒式贮箱技术,高速大容量数据处理及传输技术。这些技术的掌握,将成为我国空间站建设的有力保障。
载人飞行可以充分发挥人的能动性,开展航天技术试验,利用载人飞行平台,开展空间综合应用,从而推动国家航天技术和空间应用的持续发展。
首次交会对接任务的成功实施,标志着我国突破和基本掌握了航天器交会对接技术及其组合体控制技术。预计2012年上半年发射的神舟九号载人飞船、2012年下半年发射的神舟十号载人飞船,还将与天宫一号目标飞行器执行交会对接任务,以对交会对接技术、组合体控制技术和航天员中短期驻留支持技术进行全面验证。
后续任务通过空间实验室和空间站,开始解决人类长期宇宙飞行技术,符合载人航天发展规律,符合国家发展战略。主要的发展前景包括:
(1)突破航天员长期在轨技术,奠定坚实的服务与发展基础;
(2)开展空间新技术试验,拓展载人航天领域;
(3)开展载人登月技术试验探索,开发宇宙空间资源;
(4)发展低成本的、可部分重复使用的、载人行星探测的新一代大型天地往返运输飞船。
载人航天已作为一个专项纳入国家中长期科学和技术发展规划纲要。2010年9月,中央批准实施载人空间站工程。我们相信在掌握了航天员出舱活动技术、交会对接技术、组合体控制技术和航天员驻留支持技术的基础上,大力协同、集智攻关,必将实现中国的空间实验室及后期空间站的建设任务。
(References)
[1]汤溢,王翔.航天器交会远距离导引段误差敏感度分析[J].航天器工程,2010,19(3):40-44
Tang Yi,Wang Xiang.Research on error sensitivity of spacecraft rendezvous phase[J].Spacecraft Engineering,2010,19(3):40-44(in Chinese)
[2]林来兴.四十年空间交会对接技术的发展[J].航天器工程,2007,16(4):70-77
Lin Laixing.Development of space rendezvous and docking technology in past 40years[J].Spacecraft Engineering,2007,16(4):70-77(in Chinese)
[3]周建平.载人航天交会对接技术[J].载人航天,2011(2):1-8
Zhou Jianping.Rendezvous and docking technology of human space flight[J].Manned Spaceflight,2011(2):1-8(in Chinese)
[4]Machula M,Sandhoo G.Rendezvous and docking for space exploration[C]//Orlando:1stSpace Exploration Conference:Continuing the Voyage of Discovery.AIAA,2005
[5]Fehse W.Automated rendezvous and docking of spacecraft[M].London:Cambridge University Press,2003
[6]Goodman J.History of space shuttle rendezvous and proximity operation[J].Journal of Spacecraft and Roket,2006,43(5):944-959
[7]胡海霞,解永春.国外航天器人控交会对接系统研究及分析[C]//云南昆明:全国第十一届空间及运动体控制技术学术会议.中国自动化学会,2004:187-191
Hu Haixia,Xie Yongchun.Research and analysis of foreign spacecraft manual control rendezvous and docking system[C]//Kunming,Yunnan:The 11thNational Conference on Spacecraft Control.Chinese Institute of Automation,2004:187-191(in Chinese)