月球着陆器软着陆动力学建模与分析综述
2011-12-26梁东平柴洪友
梁东平 柴洪友
(北京空间飞行器总体设计部,北京 100094)
1 引言
我国探月二期工程的一项关键技术就是月面软着陆技术。为了实现月球着陆器在月球表面成功着陆这一核心目标,月面软着陆技术和软着陆动力学仿真已成为工程界和学术界的研究热点,同时也是重点和难点。由于月球表面与地球表面有较大的差异,而且影响着陆性能的因素很多,开展物理试验费用高、周期长、难度大。因此着陆动力学仿真分析是软着陆机构研发和评估着陆器着陆性能的主要方法[1]。着陆器软着陆动力学仿真最关注解决三方面的问题[2]:着陆稳定性问题、吸能问题和载荷缓冲问题。
月球着陆器月面软着陆动力学建模和分析的目的主要有以下几个方面[1,3]:(1)研究和确定着陆器着陆冲击动力学响应及其相关技术参数,为总体评估和论证月球着陆器着陆设计方案的技术可行性提供依据;(2)通过着陆稳定性分析,确定各种着陆工况条件下着陆器着陆稳定性包络边界;(3)通过动力学响应分析确定结构的设计载荷,为结构设计提供依据;(4)为仪器设备提供力学环境条件;(5)进行试验预分析,为典型着陆工况的选取提供依据,指导试验实施。
本文在对着陆器软着陆动力学建模和分析方法进行分析与总结的基础上,提出了着陆器建模与分析方法的指导性建议,并提出了有待于进一步研究的问题。
2 着陆器软着陆动力学建模
月球着陆器多采用腿式着陆缓冲机构,着陆腿围绕着陆器中心轴均匀分布。根据单个着陆腿构型的不同,着陆腿可分为“倒三角式”和“悬臂梁式”着陆腿,如图1所示。缓冲器安装在着陆腿的主支柱和辅助支柱中[4-5]。
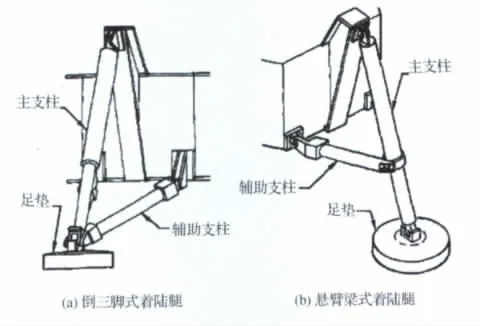
图1 着陆腿构型形式Fig.1 Configurations of landing gears
由于月球的真空环境,多采用铝蜂窝芯子作为缓冲器。着陆腿构型及月面的特殊环境,使得软着陆动力学建模包含了各种非线性因素,主要表现在以下方面:铝蜂窝缓冲器及月壤的塑性变形属于材料非线性变形;着陆过程中缓冲器会产生压缩行程,着陆腿构型不断变化,这会产生几何非线性变形;着陆腿构件间以及足垫与月壤间,接触状态和接触条件的无法预知,使得接触具有很强的非线性特性。这些因素给着陆冲击动力学建模和仿真分析带来了很大的困难。
月球着陆器软着陆动力建模包括三个方面:着陆器模型、月面模型和着陆腿足垫与月壤的接触模型。
2.1 着陆器模型
2.1.1 简单的刚体和柔性体模型
上世纪60年代初期,由于计算机速度的限制,缺乏商业化的仿真分析软件,着陆器软着陆冲击动力学模型相对比较简单,着陆器动力学分析通常采用两种不同的着陆器模型:刚体模型和柔性体模型。
当着陆器柔性对所研究的着陆性能参数的影响可以忽略时,着陆器可以理想化为一个刚性主体模型和一个着陆缓冲系统模型[6-9]。着陆腿的质量特性通常等效为集中质量进行简化处理。仿真分析过程中,着陆腿与主体结构连接点在着陆器体坐标系中的坐标是固定的,只需确定足垫与主支柱连接点的体坐标,就可以确定着陆腿的瞬时几何构型,根据缓冲器的载荷行程特性可以计算出着陆腿作用于主体结构的瞬时作用力。模型中缓冲器相当于被简化为无质量的非线性弹簧。NASA开展“阿波罗”飞船(Apollo)着陆动力学分析初期,假设足垫与刚性月面接触且不发生侧滑,这样整个模型实际只有6个自由度。6 自由度刚体模型比较简单,计算量小,但由于对模型进行了大量的简化,因此比较粗糙,所提供的设计指标过于保守,这通过试验数据和飞行实测数据得到了证实。后来的细化模型[8]释放足垫的3个平移自由度,形成了18 自由度的刚体模型,其计算精度更接近于试验值。刚体模型只考虑了质心和足垫的自由度,无法计算一些关键结构件及连接点的载荷,无法考虑着陆器本体结构柔性与着陆腿柔性的耦合作用,只适用于着陆稳定性分析。
计算着陆器着陆冲击载荷响应时,则应采用柔性体模型。波音公司的Merchant等人[10-11]以载人飞船中心(MSC,现为约翰逊航天中心)的6自由度刚体模型为基础,通过刚体模型计算获得着陆腿与主体结构连接点的载荷时间历程,然后将载荷时间历程作为结构动力学分析程序的输入条件,计算结构的弹性响应。弹性响应方程是带阻尼的标准模态方程,这些线性方程利用无阻尼正则模态的正交特性,将物理坐标转换为模态坐标,获得解耦的弹性响应方程,然后加上黏性模态阻尼。这样就可以将着陆动力学分析与着陆器本体结构动力学载荷响应分析解耦。O.R.Otto和R.M.Laurenson等人[12-14]通过有限阶自由振动模态叠加来表示结构的弹性响应,并将其叠加到大位移刚体运动上,从而获得结构的总响应,最后通过拉格朗日方程推出着陆器的运动微分方程。
自由模态叠加的方法利用了自由振动模态的正交特性,将物理坐标转换为模态坐标,物理位移通过有限阶振动模态叠加来近似表示,这样大大减少了系统的自由度。早期的柔性体模型一般只取前几阶主模态进行分析,计算精度比较低,往往只适用于主结构的分析。在方案设计阶段,这些模型能提供足够的精度用以确定初始设计参数。对于次级结构以及仪器设备连接点处的冲击载荷响应分析则需要更精确的模型。
2.1.2 多体动力学模型
随着多体动力学理论的发展和计算机运算速度的提高,出现许多商业的多体动力学分析软件,这些软件提供了良好的图形用户界面和CAD 软件接口,使着陆器的建模更加方便快捷[15-16]。Masahiro Nohmi等人[17]利用ADAMS软件建立日本月亮女神-B(SELENE-B)计划的着陆器刚体动力学模型,仿真模型包括着陆器和分布有岩石和陨石坑的着陆面,缓冲器的载荷行程特性以力函数的形式模拟。为了便于程式化编程和通用性,现有的多体动力学软件如ADAMS采用的算法多为O(n3)算法,即每个积分时间步内的运算次数与系统自由度的三次方成正比,计算效率低。杨雷[3]基于Newton-Euler方程、铰链相对坐标和铰链约束特性建立了完全递推形式的系统运动学模型和纯微分形式的着陆器多刚体动力学模型,该模型属于O(n)算法,大大提高了计算的效率,但建模推导过程比较复杂,且没有考虑结构柔性。
为研究结构柔性对着陆器性能的影响,通常采用部件模态综合(CMS)的方法,通过有限元分析软件生成着陆器的模态中性文件,并导入多体动力学软件中,建立刚柔耦合或柔性体模型[18-19],如图2所示。分析结果表明,结构柔性对着陆冲击响应有较大的影响。采用模态综合方法可以减小计算量,提高计算效率,改善数值求解矩阵的性态。
多体动力学模型的计算效率高,可以在短时间内完成大量工况仿真,但计算精度稍低,特别是无法准确模拟足垫与月壤相互作用力的影响。着陆腿支柱内外筒接触面之间,由于存在法向力而产生摩擦力,法向力的大小取决于着陆腿几何构型和所承受的载荷,当分析模型考虑结构柔性时,内外套筒接触面法向力十分复杂,而多体动力学模型内外套筒之间通常采用滑动副的约束形式,因此很难准确地计算出着陆腿支柱内外筒之间的摩擦力。着陆腿柔性体模型的柔性信息通常是以着陆冲击前的构型和边界条件给出的,在着陆冲击过程中,着陆腿支柱内外套筒会产生压缩行程,着陆腿构型和边界条件是不断变化的,用着陆冲击前的构型和边界条件生成的模态中性文件,来分析着陆冲击过程也会产生一定的模型误差。
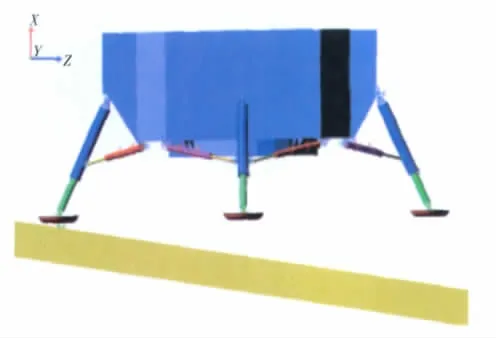
图2 着陆器ADAMS模型[18]Fig.2 ADAMS model of lander
2.1.3 有限元模型
有限元方法也是着陆器软着陆动力学分析的有效方法,它可以综合考虑模型中的材料、几何、接触非线性因素。对于着陆冲击问题通常采用显式动力学有限元程序求解[20]。常用的显式非线性动力学软件有MSC.Dytran、LS-Dyna、ABAQUS/Explicit等。显式非线性有限元动力学模型的数值解法,是将结构在空间域进行离散,把连续的微分方程转换成有限阶的代数方程组

对求解的时间历程在时间域内离散,并采用显式积分方法进行求解。中心差分法是最常用的显式积分方法,积分步骤如下


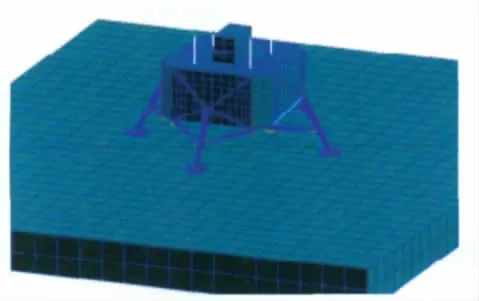
图3 着陆器有限元模型Fig.3 FEM model of lander
显式动力学程序求解效率高,但却是条件稳定的。稳定时间积分步长与模型中最小单元的特征尺寸和波速相关。此外,模型中的接触和约束条件也对稳定时间积分步长有重要影响。对于着陆器这样复杂的模型稳定时间积分步长是很小的,因此需要大量的时间积分步。显式动力学分析程序求解效率高的一个重要因素是采用了对角集中质量矩阵,由于部件模态综合模型减缩技术会改变质量矩阵的对角特性,商用有限元显式动力学分析程序通常不支持超单元,因此要减少模型自由度只能对模型进行合理地简化,减小模型网格密度,在求解精度和计算量之间寻求一个平衡点,以适应工程仿真的要求。着陆器结构很复杂,需要试验数据的验证和修正,才能建立出正确的反映着陆器结构动态特性的有限元模型,从而为确定着陆器上的仪器设备的力学环境条件提供依据。
2.2 月面模型
月面模型的建立应考虑两个方面,即月壤的力学特性和着陆面的地形[23]。从月壤的力学特性出发,月面模型可以分为刚性月面模型和柔性月面模型。
2.2.1 月壤有限元模型
采用有限元模型进行着陆冲击响应分析时月壤的建模是一个难点,主要涉及材料模型选择和模型参数的标定。月壤本构模型的相关文献很少,由于土壤与月壤在宏观力学特性的相似性,通常选择已有土壤模型作为月壤的本构模型。常用的土壤模型有摩尔-库仑(Mohr-Coulomb,M-C)模型、德鲁克-普拉格(Drucker-Prager,D-P)模型等。M-C模型假设当发生屈服时,材料体内一个平面上的剪应力和法向应力达到一个临界状态。在主应力空间内,M-C模型的屈服面是一个半无限六面棱锥体。D-P模型引入静水压力作为M-C模型的光滑近似,在主应力空间内为一个半无限圆锥体。与M-C模型相比,D-P模型在整个屈服面上是连续可微的,因此可以很容易采用数值算法进行分析。为考虑土壤的塑性压缩,通常会在D-P模型圆锥屈服面底端加一个椭圆帽形面,形成Cap D-P模型。
有限元分析软件提供了许多用于土壤力学分析的材料模型。兰利研究中心(LaRC)研究人员[24-26]采用了LS-DYNA软件中的Mat 5模型用于“猎户座”成员探索飞行器(CEV)的着陆仿真,Mat 5模型是LS-DYNA软件中最老的与压力相关的土壤模型,积累了大量的用户使用经验,且需要用户输入的本体结构模型参数较少,在CEV 初始设计阶段能提供足够的分析精度。闫军[27]等采用LS-DYNA软件中的D-P模型对金属半球跌落进行模拟,仿真结果与试验结果很接近,间接证明了该模型用于模拟月壤的合理性。Fasanella E.L 等人[28]采 用MSC.Dytran软件中的DYMAT 24 材料模型,用于进行金属半球跌落的试验仿真,并与试验值进行对比,证明了该模型能较好地描述土壤类材料的撞击动力学特性,文献[21]以此为依据采用DYMAT 24作为月壤的材料模型,并用于着陆器的着陆仿真。杨艳静[29]将Duncan-Chang非线性弹性模型和D-P屈服准则相结合,形成非线性弹性-理想塑性本体结构模型,并通过ABAQUS软件的用户材料子程序UMAT 接口实现该模型,用于月球车和月壤相互作用模拟,但该模型没有考虑月壤的硬化特性。
商业有限元软件提供了各种岩土材料模型,但是每种模型均有不足之处,往往缺少基本的材料数据和试验数据,让用户难以选择和使用。由于在月壤有限元仿真中,必须指定所需的试验类型和数量,用于恰当地描述材料的响应和标定材料模型参数。虽然美国Apollo计划和苏联的“月球”(Luna)系列探测任务共取回了100多千克的月壤样本,但仍不足以进行完备的土壤力学试验。这些样本通常被用于研究月壤的物理、化学及相关的岩土特性参数,然后根据这些基本信息,选择合适的地球土壤配制成模拟月壤,以支持月球探测工程中着陆器、月球车的研发。因此,有必要对模拟月壤开展相关的土壤力学试验,标定月壤本构模型屈服面参数及其硬化特性,用于支持着陆动力学仿真。
2.2.2 月壤离散元模型
离散元方法也可以用于月壤建模,离散元方法的计算域由离散的颗粒单元组成,通过研究离散元系统的集体运动,就可以得到模拟对象的力学状态分布及演化规律[30-31]。马炜[32]用离散元方法对半球冲击试验进行了建模与仿真,从仿真结果可以看出用离散元方法可以较好地模拟土壤介质的接触冲击过程。离散元方法能很好的模拟散体材料的流动、飞溅和在冲击载荷作用下的动力学响应特性。但离散元仿真的颗粒数与计算时间受到计算机速度的限制,一般的散体材料颗粒数少则几万,多则上亿,因此每次仿真的时间甚至有可能超过一次物理试验的时间。离散元与大型有限元分析程序的结合还未能实现,在工程上尚不具备大规模应用的条件。2.2.3月面地形模型
着陆器在月球上着陆需要考虑的地形(terrain)参数主要包括:着陆坡度、撞击坑(crater)大小和分布、石块的大小和分布。由于着陆器着陆的地点是以一个着陆区域的形式给出的,着陆器可能在该区域内任意位置着陆,因此地形模型往往是以平均值或概率分布的形式给出的。在NASA航天器设计标准中[23],给出了着陆面坡度平均值和累积频率分布,撞击坑和石块大小和分布概率,由于该标准定制时间较早,很多数据都是通过低分辨率的照片和推测获得,模型精度较低。地形模型几何特征还可以通过数字高程图(DEM)描述。地形模型信息可以用于着陆统计分析,确定着陆器成功着陆的概率。
世界进入读图时代后,影像与图片自然而然地成为了重要且便捷的信息传递载体,将越来越多地发挥文化交流与文明融合的功能,为世界各地人们的对接、交流、互动发挥巨大作用。
2.3 着陆器足垫与月壤接触模型
在着陆器着陆动力学仿真中,如何描述着陆器足垫与月壤之间的接触撞击作用是一个关键因素。足垫与月壤相互作用模型是着陆器着陆冲击响应的重要输入条件,关系到着陆冲击仿真结果的正确性和精度。目前描述着陆器足垫与月壤之间接触撞击模型作用主要有半经验公式法、有限元接触算法和离散元方法等。
2.3.1 半经验公式接触模型
半经验公式法是采用集中力来刻画月壤与足垫间的相互作用。足垫与着陆表面接触区域的法线方向的作用力表达式通常包括静承载强度项和动力相关项。静承载强度通常随贯穿深度的增加而增大,动力相关项通常与接触面材料的容积密度和贯穿速度有关。当着陆器沿着陆面切线方向的速度较大时需要考虑切线方向的接触力。切线方向的作用力通常包括摩擦力和犁铧力(plowing)[33-34]。
在NASA喷气推进实验室(JPL)[34-35]建立的勘测者号(Surveyor)着陆动力学仿真模型与载人飞船中心(MSC)[8]建立的Apollo着陆动力学仿真模型中,其足垫与月壤接触模型都未考虑月壤的力学特性参数,其待定参数需要通过试验获得,且与足垫的几何参数和特定着陆工况相关。这些模型的特点是用一系列集中参数(lumped-parameter)来描述月壤的静承载强度和动力学响应特性,因此也可称为集中参数模型[3]。奔迪克斯公司(Bendix Co.)[36-37]为NASA开发了半经验公式模型,其中考虑了月壤的力学特性参数。对接触作用力影响较大的参数包括:容积密度、相对密度、内摩擦角和在特定围限压力下的有效弹性模量。该模型接触力表达式比较复杂,计算量比较大。NASA设计标准推荐,在缺乏对着陆面材料力学特性相关知识的条件下,优先使用表达式比较简单的集中参数模型[33]。
半经验公式模型描述简单,计算速度快并且可以方便地与着陆器多体动力学模型相结合[17-19],在着陆器软着陆动力学仿真分析中得到了比较普遍的应用。但半经验公式也存在以下几方面的不足:模型中的参数与足垫几何参数以及分析的工况相关,需要通过物理试验获得,且当足垫几何参数或工况变化时需要试验获得新的参数;因此其通用性较差,在实际分析中存在很多不便。
2.3.2 有限元接触模型
非线性有限元动力学分析软件通常都提供各种复杂的接触算法,并引入了各种土壤材料模型,只要合理地定义接触面和接触参数就可以对着陆器着陆过程中足垫与月壤的相互作用进行模拟仿真,但计算结果的可靠性和正确性很大程度上还取决于月壤的本构关系模型和力学特性参数这两个关键要素[20-21,38]。有限元方法采用了连续介质概念,它在描述局部非均匀、非连续演化和散体介质时存在相当的困难。
软着陆动力学建模方法及其之间的关系如图4所示。足垫与月壤的接触模型和月壤模型的选择是根据着陆器的建模方法确定的。多体模型和有限元模型复杂、计算精度高,但还不能完全取代简单的刚体和柔性体模型;简单的刚体和柔性体模型可以提供工程使用的简单分析方法,适用于方案设计阶段的初步分析,此时着陆器结构的详细技术状态还不明确,无法建立复杂的分析模型;简单分析模型概念清楚、物理意义明确,可用于验证多体或有限元模型的正确性;随着设计的进一步深入,则需要采用更精确的多体或有限元模型进行分析,指导结构设计。

图4 软着陆动力学建模方法及其联系Fig.4 Soft landing dynamic modeling methods and relation
3 着陆冲击动力学分析方法
建立起着陆器软着陆动力学模型后,就可以对着陆器软着陆性能进行分析,采用的分析方法有绝对性能法(Absolute-performance Method)和统计法[33]。
采用绝对性能法对某一着陆性能进行分析时,应对输入参数进行系统组合,确定对所研究着陆性能参数最恶劣的工况条件。对于没有确定值的输入参数,则使用该参数的正态分布3σ临界值。通常情况下,最恶劣工况条件并不是输入参数的最大值或最小值的组合。文献[6-9]就是采用确定型分析方法用于Surveyor探测器和Apollo登月舱的设计,要求在指定范围内的任何着陆条件下都不会发生着陆失败。确定型着陆分析方法的优点有:当在给定的着陆初始条件范围内的最恶劣工况确定后,在设计与试验过程中不会发生大的变化;可以确定一些极限工况条件用于指导试验实施;可以快速评估着陆器设计参数的变动对着陆性能的影响。确定型分析方法的缺点是:将全部输入变量的临界条件组合后,可能会导致过裕量设计。
统计法的原理是:给关键的输入参数定义一个概率密度函数,这些输入参数包括着陆器的设计参数和着陆时的初始和边界条件等,然后采用蒙特卡洛法生成输入参数的样本集合。蒙特卡洛法着陆仿真分析的输出参数通常是用来描述着陆性能的参数,如着陆面与主体结构的间隙、关键质量点的最大加速度,着陆腿支柱载荷、着陆腿支杆行程、稳定性等,这些性能参数通常也称为设计参数[33]。这种方法在Surveyor,Apollo,海盗号(Viking)等行星探测器的设计中已经得到应用[10-11,39-42]。输入参数概率密度函数的精度对统计型分析方法的计算结果具有至关重要的作用。如果无法获得建立概率密度函数的基本信息,则一般假定一个较为保守的概率分布。同时还要评估假定的概率密度函数对分析结果的敏感性[33]。
统计型着陆分析方法的优点有:减小着陆缓冲系统的过裕量设计程度;可以确定成功着陆的概率,并与其它子系统成功的概率比较和结合,从而确定任务成功的概率。统计型分析的最大缺点是:在着陆器详细设计和相关参数确定前,无法确定每个着陆仿真输入参数的精确概率密度函数。此外,要使计算的成功着陆概率在可接受的置信极限范围内,需要大量的着陆仿真次数,这将会需要大量的计算时间。同时,如果要评估设计参数或着陆条件对变化着陆性能的影响,则要重复以上过程,从而消耗大量的时间。
4 结束语
在方案设计阶段,由于设计和技术状态的未知性,应采用简单的刚体、柔性体模型或多体动力学模型进行着陆仿真分析,确定方案的可行性,并对不同的方案进行比较,选择最优的设计方案。在详细设计阶段,结构几何参数和材料属性已经基本确定,应采用更精确的有限元模型开展着陆冲击仿真,确定关键结构件冲击载荷和关键设备连接点动态响应,确定仪器设备的力学环境条件。当设计参数未确定或采用计算量大的有限元模型时应采用绝对性能分析方法,而在设计参数基本确定并可获得关键输入变量概率密度函数时,需要采用简单高效的分析模型,开展蒙特卡洛统计仿真分析,评估并减小着陆系统的过裕量设计,确定着陆任务成功的概率。
在对建模与分析方法进行分析研究的基础上,得出以下有待进一步研究和发展的几个方面:
(1)着陆器主体结构的着陆冲击动态响应比较复杂,需要建立细化的有限元模型和开展试验测量,明确其响应特性,修正仿真模型,从而明确设备的响应方式,为确定着陆器主体结构上设备的力学环境条件提供依据。
(2)对模拟月壤开展完备的土壤力学试验,选择合理的月壤本构模型,利用试验数据标定月壤本构模型的屈服面及其硬化特性参数,并建立月壤力学特性参数数据库,用于支持月壤的有限元建模。
(3)着陆腿套筒弹性变形对套筒轴承摩擦力的影响需要采用更细化的有限元模型进一步研究。
(4)采用蒙特卡洛分析方法时,需要更高效的建模和求解方法,需要进行参数化和自动化建模以适应大规模工况的统计仿真分析。
(5)开发着陆动力学计算机仿真平台,或者在商业分析软件平台上对着陆器模块进行二次开发,支持今后星际探测器的研发与着陆仿真分析。
(References)
[1]Rogers W F.Apollo experience report-Lunar module landing gear subsystem,NASATN D-6850[R].Washington:NASA,1972
[2]Doiron H H,Zupp G A.Apollo lunar module landing dynamics[C]//Atlanta:The 41stStructures,Structural Dynamics,and Materials Conference and Exhibit.AIAA/ASME/ASCE/AHS/ASC,2000
[3]杨雷.月球探测器着陆过程动力学建模与仿真技术[D].北京:中国空间技术研究院,2009
Yang Lei.The modeling and numerical simulation for the touchdown dynamics of lunar explorer[D].Beijing:China Academy of Space Technology,2009 (in Chinese)
[4]Vergnolle J F.Soft landing impact attenuation technologies review[C]// Washington:The 13thAerodynamic Decelerator Systems Technology Conference.AIAA,1995
[5]杨建中,曾福明,满剑锋,等.月球着陆器软着陆机构研制的关键问题及其解决思路[C]//北京:中国科学技术协会,2006
Yang Jianzhong,Zeng Fuming,Man Jianfeng,et al.Key problems and solving approaches in the development of soft landing mechanism of lunar lander[C]//Beijing:China Association of Science and Technology,2006(in Chinese)
[6]Alderson R G,Wells D A.Final report on surveyor lunar touchdown stability study,NASA-CR-80514[R].Washington:NASA,1966
[7]Bendix.Documentation of digital computer programs for lunar landing dynamics system investigation,NASA-CR-130602[R].Washington:NASA,1964
[8]Doiron H H,Zupp G A.Amathematical procedure for predicting the touchdown dynamics of a soft-landing vehicle,NASATN D-7045[R].Washington:NASA,1971
[9]Hildermar R A,Mueller W H,Morton M.Landing dynamics of the lunar excursion module[J].Journal of Spacecraft and Rockets,1966,3(10):1484-1489
[10]LM-10lunar landing loads analysis,NASACR-135919[R].Washington:NASA,1970
[11]Merchant D H,Sawdy D T.Monte carlo dynamic analysis for lunar module landing loads[J].Journal of Spacecraft,1971,8(1):48-55
[12]Otto O R,Laurenson R M,Melliere R A,et al.Analyses and limited evaluation of payload and legged landing system structures for the survivable soft landing of instrument payloads,NASACR-111919[R].Washington:NASA,1971
[13]Laurenson R M,Melliere R A,John R.M.Analysis of legged landers for the survivable soft landing of instrument payloads[J].Journal of Spacecraft,1973,10(3):208-214
[14]Laurenson R M.Analytical determination of the effect of structural elasticity on landing stability of a version of the viking lander,NASACR-112115[R].Washington:NASA,1973
[15]张志娟,杨雷.月球探测器软着陆过程仿真研究[C]//北京:MSC.Software 虚拟产品开发中国用户大会,2007
Zhang Zhijuan,Yang Lei.Simulation research of softlanding process of lunar lander[C]//Beijing:China User Conference of MSC.Software Virtual Product Develoment,2007(in Chinese)
[16]王少纯,邓宗全,杨涤,等.月球着陆器新结构的ADAMS仿真研究[J].哈尔滨工业大学学报,2007,39(9):1392-1394
Wang Shaochun,Deng Zongquan Yang Di,et al.Simulation research on novel structure of lunar lander based on ADAMS[J].Journal of Harbin Institute of Technology,2007,39(9):1392-1394(in Chinese)
[17]Masahiro N,Akira M.Modeling for lunar lander by mechanical dynamics software[C]//San Francisco:Modeling and Simulation Technologies Conference and Exhibit.AIAA,2005
[18]曾福明,杨建中,朱汪,等.月球着陆器着陆缓冲性能研究[J].航天器工程,2010,19(5):43-49
Zeng Fuming,Yang Jianzhong,Zhu wang,et al.Research on landing impact attenuation performance of lunar lander[J].Spacecraft Engineering,2010,19(5):43-49(in Chinese)
[19]逯运通,宋顺广,王春洁,等.基于刚柔耦合模型的月球着陆器动力学分析[J].北京航空航天大学学报,2010,36(11):1348-1352
Lu Yuntong,Song Shunguang,Wang Chunjie,et al.Dynamic analysis for lunar lander based on rigid-flexible coupled model[J].Journal of Beijing University of Aeronautics and Astronautics,2010,36(11):1348-1352(in Chinese)
[20]Fasanella E L,Jackson K E.Best practices for crash modeling and simulation, NASATM-2002-211944[R].Washington:NASA,2002
[21]万峻麟,聂宏,陈金宝,等.月球着陆器有效载荷着陆冲击响应分析[J].宇航学报,2010,31(11):2456-2464
Wan Junlin,Nei Hong,Chen Jinbao,et al.Impact response analysis of payloads of lunar lander for lunar landing[J].Journal of Astronautics,2010,31(11):2456-2464(in Chinese)
[22]Junlin Wan,Hong Nie,Jinbao Chen,et al.Modeling and simulation of lunar lander soft-landing using transient dynamics approach[C]//Chengdu:International Conference on Computational and Information Sciences,2010
[23]NASALangley.Lunar surface models NASAspace vehicle design criteria environment,NASASP-8023[R].Washington:NASA,1969
[24]Fasanella E L,Lyle K H,Jackson K E.Developing soil models for dynamic impact simulations,LF99-7733[R].Washington:NASA,2009
[25]Heymsfield E,Fasanella E L.Using numerical modeling to simulate space capsule ground landings,20090007688[R].Washington:NASA,2009
[26]Fasanella E L,Jackson K E,Kellas S.Soft soil impact testing and simulation of aerospace structures,20080022954[R].Hampton:NASALRC,2008
[27]闫军,杨雷,张志娟,等.月壤力学材料模型验证研究[C]//安庆:全国结构动力学学术研讨会,2009
Yan Jun,Yang Lei,Zhang Zhijuan,et al.Research on verification of lunar soil material model[C]//Anqing:National Academic Symposium of Structure Dynamics,2009(in Chinese)
[28]Fasanella E L,Jones Y,Knight N F,et al.Earth impact studies for Mars sample return[J].Journal of Spacecraft and Rockets,2002,39(2):237-243
[29]杨艳静.模拟月壤和月球车车轮相互作用的数值仿真和试验研究[D].北京:中国空间技术研究院,2010
Yang Yanjing.Numerical and experimental research of interaction between lunar soil and lunar rover wheel[D].Beijing:China Academy of Space Technology,2010(in Chinese)
[30]Renzo A,Maio F P.Comparison of contact-force models for the simulation of collisions in DEM-based Granular[J].Chemical Engineering Science,2004,59(3)
[31]Ha H B,Taizo K,Ryoichi F,et al.Numerical and experimental studies of gravity effect on the mechanism of lunar excavations[J].Journal of Terramechanics,2009,46:115-124
[32]马炜.散体介质冲击载荷作用下力学行为理论分析与算法实现[D].北京:北京大学,2008
Ma Wei.Dynamical behavior of granular materials under impact[D].Beijing:Peking University,2008 (in Chinese)
[33]Jones R H.Landing impact attenuation for non-surface-planing landers,NASASP-8046[R].Washington:NASA,1970
[34]Sperling F,Garba J.Atreatise on the Surveyor lunar landing dynamics and an evaluation of pertinent telemetry data returned by Surveyor I,NASA-CR-87421[R].Washington:NASA,1967
[35]Sperling F B.Basic and mechanical properties of the lunar soil estimated from Surveyor touchdown data,NASA-CR-109410[R].Washington:NASA,1970
[36]Winters H K,Alderson R G,Woo J Y,et al.Lunar module(LM)soil mechanics study,NASACR 92208[R].Washington:NASA,1968
[37]Black R J,Winters H K.Footpad-soil interactions during spacecraft touchdown[J].Bendix Technical Journal,1968:19-32
[38]Shoop S A.Finite element modeling of tire-terrain in-teraction[D].Michigan:University of Michigan,2001
[39]Chenoweth H B.Monte Carlo simulation of the Apollo command module land landing[J].Journal of Spacecraft,1971,8(10):1074-1078
[40]Lavender R E.Monte Carlo approach to touchdown dynamics for soft lunar landings,NASATN D-3117[R].Washington:NASA,1965
[41]Muraca R J,Campbell J W,King C A.AMonte Carlo analysis of the viking lander dynamics at touchdown,NASA-TN-D-7959[R].Washington:NASA,1975
[42]Queen E M,Striepe S A,Powell R W.An approach to simulation of extreme conditions for a planetary lander,NASATM-2001-211246[R].Washington:NASA,2001