INS辅助的GPS接收机快速捕获技术研究*
2011-12-07袁俊刚范胜林刘建业
袁俊刚,范胜林,刘建业
(南京航空航天大学导航研究中心,南京 210016)
0 引言
GPS和INS有着各自的特点与优点,同时也具有各自的缺陷和不足。在GPS/INS紧组合导航系统中,可以利用INS的速度信息和历书数据辅助GPS信号的捕获和跟踪过程,以提高GPS的动态性能和接收精度[1]。当应用环境对GPS信号捕获的快速性有特殊要求时,如战机、导弹等高动态环境下,用INS辅助GPS信号捕获可以大大缩短信号捕获时间,对提高接收机的动态性能和快速反应能力具有重要的现实意义。
文中对传统的GPS信号捕获方法进行了分析和讨论,在此基础上针对高动态环境下GPS接收机启动时信号的快速捕获问题,提出一种用惯性信息辅助GPS接收机进行信号快速捕获的方法,分别从理论分析和仿真验证的角度验证了此方法在缩短捕获时间的同时也能够达到较高的捕获精度,较好的提高了接收机的捕获性能,所设计的INS辅助的GPS接收机快速捕获方法适用于机动性较高的载体。
1 GPS信号捕获技术分析
GPS信号捕获的目的是搜寻可见卫星,找到每一个可见卫星C/A码的起始位和多普勒频移,为后续的信号跟踪环节提供初始条件。GPS信号搜索方法可分为基于频域的搜索方法如FFT算法和基于时域的搜索方法。下面对典型的几种捕获方法展开分析和讨论。
捕获的基本思想就是展开输入信号,找到载波频率。如果相位正确的C/A码与输入信号相乘,输入信号将变成一个连续信号。开始捕获过程的通常方法是搜索接收机视界内的所有卫星,如果知晓了其大致位置和近似GPS系统时,便可确定视界内的卫星空间位置的信息,或者由最近的历书记录计算出其空间位置。如果用这种方法捕获,只需搜索为数不多的卫星 (如果是地面用户最多11颗),但是如果开始得到错误的位置和时间,那么由于捕获过程开始搜索到错误的卫星而使得正确卫星的定位时间变长。
基于硬件相关器的捕获方法是由硬件实现的,硬件相关器包括本地载波发生器、本地伪码发生器、I路和Q路乘法器、积分器以及相应的控制电路。信号捕获的过程就是不断调整本地载波频率和伪码相位,直至伪码相位差和载波频率差都为0。对于一个载波频率和伪码相位的组合,完成一次积分的时间是固定的,所以完成全部的频率和相位组合搜索的时间也是固定的,而且在如此多的数据中寻找最高频率分量也是非常费时的,这样就限制了搜索的速度。
另一种搜索卫星的方法是对空间中的所有卫星进行捕获,这种方法假定已知空间中有哪些卫星。如果对空间中的卫星一无所知,将必须对32颗可能的卫星 (还包括备用卫星)进行捕获,这必将非常耗时,循环相关捕获的方法这时往往是首选的方法。在此方法中,输入电文不是连续到达接收机的,因此循环相关操作可以处理一组或一批电文。但是由于其复杂的算法,需要增加新的硬件资源,且硬件实现起来比较困难。
基于延迟与累积的捕获方法是为了去除输入信号中的频率信息,去除了频率信息以后,只需用本地产生的C/A码去寻找输入信号C/A码的起始点,一旦找到其起始点,就可由FFT或DFT得到其频率。所以从运算量上看此捕获方法开销较小。但是这种方法在实际应用中也有一些限制,如在选定的块长度内,采样频率必须保证采样点数目为整数,否则,在对多个块做累加时会带来误差,同时在参与累加的多个数据块之内,信号的载波频率必须变化很小,导航电文比特不能发生跳变,这一点限制了累加的数据长度,而较短的累加长度使得信号增益受到限制[2]。
2 INS辅助GPS捕获技术研究
2.1 INS辅助捕获方法
在高动态环境下,接收机产生较大的多普勒频移 (±10k Hz),附加在GPS载波信号上,而载频估计误差过大将导致相关输出降低,影响码的捕获。此时如果能够在捕获回路中加入惯性信息辅助,利用INS速度信息和位置信息得到频率偏移的估计值,就可以大大减弱由于载体高动态引起的多普勒频移不确定性,以减小频域搜索范围,避免将大量时间浪费在无信号区域的搜索,从而缩短捕获时间,提高GPS接收机的捕获性能。类似的,在码相位搜索方向,也可以利用INS信息和历书数据估算码相位偏移,以使得本地码和输入信号的码相位初步对齐,从而避免对1023个码相位逐个作相关运算,大大减少了运算量。
GPS信号从卫星传到接收机的过程中,使载波产生多普勒频移的主要因素有:卫星与载体的相对运动,接收机时钟频率漂移和GPS卫星频率漂移。因此,载波的多普勒频率 f d可表示为:

式中:f rec为载体运动产生的多普勒频移;f s为卫星运动产生的多普勒频率;Δf rec为接收机时钟频率漂移带来的频率误差;Δfs为GPS星时钟频率漂移。
如果知道了卫星和载体的速度,则可计算卫星和载体运动产生的多普勒频率为:

式中:λ为载波的波长;V rec为载体的速度;V s为卫星的速度;e d为卫星到用户连线的单位矢量。由于GPS星时钟频率漂移比较小,故Δf s可忽略不计,Δf rec的值是在启动时由用户估计产生。

图1 INS辅助捕获结构图
图1 给出了INS辅助捕获的结构示意图。由图可见,根据INS数据提供的速度和位置信息结合星历数据可以解算载体和卫星之间的多普勒频移和欲捕获卫星的伪距,从而得到码偏移量。将估计的码偏移量和频率偏移量作为码偏移量和频率偏移量的中心,并根据速度和位置信息的不确定性设定搜索边界,控制本地码DCO和载波DCO在此范围内进行搜索,就可以大大减少码域和频域搜索的次数,从而大幅缩短接收机搜索捕获的时间。
2.2 捕获性能分析
对高动态的GPS捕获环路,捕获时间是最重要的性能指标。如果选取的硬件可以在搜索单元停留时间内完成所需的运算,则捕获时间由总的搜索停留时间决定[3]。当采用基于FFT的频域并行捕获算法时,时域和频域的二维搜索转变为频域的一维搜索,搜索所需的最大时间变为:

F为多普勒频移搜索范围;δfd为多普勒频率搜索的步长;R s为平均搜索速率(单元数/s):

式中:C/N0为接收机输入端的有效信噪比,β为漏检概率[4]。
当无外部信息辅助捕获时,总的多普勒频移搜索范围F为±10kHz,假定δf d为500Hz,C/N0为40d B·Hz即C/N0=104Hz,β为0.1,由式(4)可得Rs=900(单元数/s),代入式(3)可得 T s≈44ms。
当采用INS信息和历书信息辅助捕获时,根据组合导航系统输出的速度信息和一周时间内的历书,由卫星运动引起的多普勒频移可以从±5kHz压缩到±150Hz以内[5]。故可以认为在惯性信息和历书的共同辅助下,信号多普勒频域搜索范围必然在±160Hz内。由于该值小于第一次捕获的搜索步长500Hz,故仅需一次搜索即可得到码相位参数和粗略的多普勒频移值,对应搜索时间为在多普勒频域对任何一个频率点完成一次数据采集所需的时间,通常为一个周期的伪随机码的持续时间,即T s=1ms。
无外部信息辅助和有惯性信息及历书辅助情况下对应的搜索范围、次数和所需时间总结见表1。
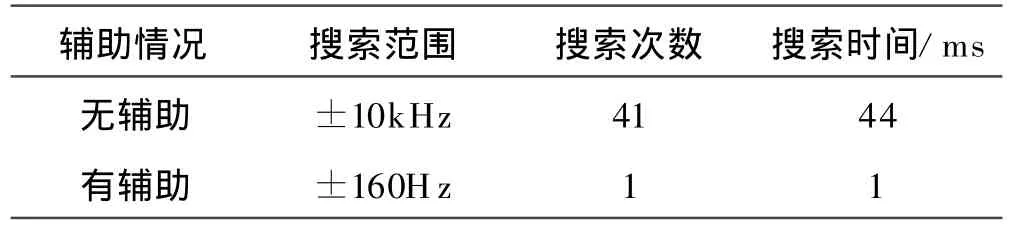
表1 有辅助和无辅助对比表
由表1可见,惯性信息及历书的辅助可将捕获的搜索范围、次数和时间大幅减少,由于缩短信号的搜索时间即是缩短捕获时间,故惯性信息及历书的辅助可以大大提高搜索的速度,缩短捕获时间。另外,当载体的加速度为40g时,1ms时间内的速度变化大约对应2Hz的多普勒频移,其值在捕获的频率分辨率之内,故该方法在提高捕获速度和频率分辨率的同时也能够达到系统对GPS信号捕获实时性的要求。
3 仿真试验与分析
3.1 仿真设计
文中试验采用Matlab语言对无外部辅助信息、惯性及历书辅助下的捕获过程分别进行系统级仿真。惯性及历书辅助的快速捕获方法仿真程序流程图如图2所示。
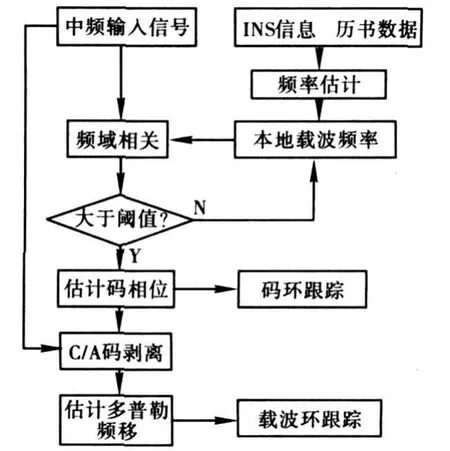
图2 惯性和历书辅助下的捕获流程图
由图2,根据惯性速度和位置辅助信息及历书数据,由式 (2)可以解算出载体和卫星间附加在载波上的多普勒频移,用该估算结果控制本地载波 DCO的输出,与数字中频信号作频域相关运算,检验其峰值是否大于预设的阈值。若大于阈值则判断粗捕获成功,根据峰值的位置计算码相位并将结果传送给码跟踪环和精捕获模块,否则原频率点两侧做逐次扫描直至捕获成功。然后根据粗捕获的码相位结果剥离原始中频信号中的C/A码,得到精确的多普勒频移结果并传送给跟踪模块。
在仿真中模拟接收到的GPS数字中频信号可以表示为:

其中:A为信号幅值;D(t-τ)为导航电文;x(t-τ)为C/A码;f IF为射频接收前端输出的数字中频;f d为接收机接收到的信号多普勒频移;δθ为载波相位偏差;n(t)为噪声[6]。仿真试验中设置 f IF=1.4053968MHz,采样器的采样频率 f S=5.714285MHz,C/A码速率为1.023MHz,初始相位在[0,1023]间均匀分布,信道噪声为高斯噪声,信噪比C/N0=40dB·Hz。
3.2 仿真结果与分析
无外部信息辅助的捕获结果如图3所示。图中相关峰值的码相位为第 5140采样点处,由图可见,无任何外部信息辅助时需要搜索次数为 41次,相应搜索时间为 41ms,但其中绝大部分时间花费在无信号区域的搜索上。
加入惯性信息和历书数据辅助的捕获结果如图4所示。

图3 无外部信息辅助时的捕获结果
对比图 3和图 4可见,运用惯性信息和历书辅助时,粗捕获中由于预先估计了多普勒频移并控制本地载波发生器在设定的频点进行搜索,故仅需一次搜索即可捕获到信号,搜索时间大大缩短。精捕获过程将粗捕获的多普勒频移捕获结果的分辨率从500Hz提高到几个赫兹,然而消耗的时间相对于1ms的采样时间可以忽略不计。故对整个捕获过程而言,所需的总捕获时间约等于进行一次搜索的数据采集时间 (1ms)与两次 5714点FFT及IFFT变换的时间 (约几百微秒)之和,相对于无外部辅助的总捕获时间,约为其2.5%。
仿真结果表明,在缩短了捕获时间并保证码相位精度的同时,运用文中所研究的方法所得到的频率分辨率完全可以满足后续跟踪环节的需要。
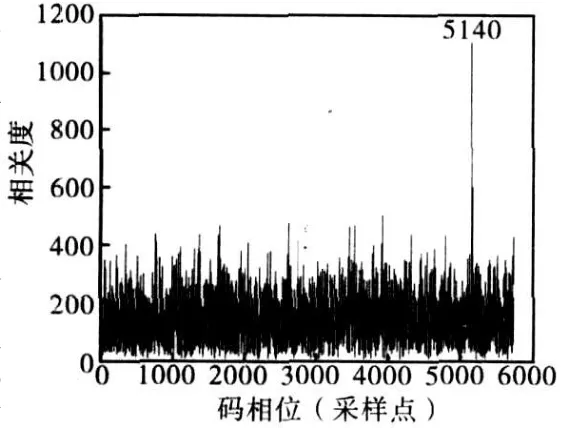
图4 INS辅助下的捕获结果
4 结论
文中在GPS接收机传统捕获方法的基础上着重分析了INS辅助下的GPS信号快速捕获方法,采用惯性速度和位置信息以及历书数据辅助GPS进行信号捕获,仿真结果表明,运用该方法能够快速的捕获到卫星的码相位和多普勒频移,明显的减少了捕获时间,提高了接收机的性能,为GPS信号的跟踪创造了有利条件。
[1] E Mooij,Q Chu.Tightly-coupled IMU/GPS re-entry na-vigation system[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit.02-5005.Monterey,California,Aug.5-8,2002.
[2] 鲁郁.GPS全球定位接收机—原理与软件实现[M].北京:电子工业出版社,2009.
[3] Hong Li,Mingquan Lu,Zhenming Feng.Improved zero-padding method for rapid long PN-Code acquisition[J].IEEE Transactions on Signal Processing,2008,56(8):3795-3799.
[4] TN Upadhyay,BA Kriegsman,DB Cox Jr.Benefits of integrating GPS and inertial navigation system[C]//The Institute of Navigation 38th Annual Meeting,1982.
[5] 唐康华.GPS/MIMU嵌入式组合导航关键技术研究[D].长沙:国防科学技术大学,2008.
[6] Sameet M Deshp.Study of interference effects on GPS signal acquisition[D].University of Calgary,2004.
