微型车电动助力转向控制策略的研究与设计*
2011-10-27池保忠
池保忠
(江苏广播电视大学常熟学院,江苏常熟215500)
微型车电动助力转向控制策略的研究与设计*
池保忠
(江苏广播电视大学常熟学院,江苏常熟215500)
微型车在实际驾驶的过程中随车速的变化,驾驶员所需转向力矩也在变化。EPS核心技术是EPS的控制策略,这种策略依然处于不断的发展之中。本文在对EPS基本控制原理进行充分研究的基础上,对EPS具体控制模式进行了系统分析,并设计了微型车EPS的具体控制策略。
微型车;电动助力转向;控制策略
微型车在实际环境下的驾驶过程中,随着其车速的快慢,车辆驾驶员所需要的相关转向力矩也是不一样的,具体表现如下:在进行高速转向时,驾驶员所需的力矩较小,而与之相对应的是:低速转向所需的力矩大。所以,应该随着车辆行驶和转向状态而改变EPS助力大小。电机助力特性指的是随车辆受力状况(转向盘转矩)和运动状况(车速)的变化而变化的一般规律。对于电动助力转向系统而言,直流电机电流与助力的关系是成比例的,所以,微型车的助力特性能够引入变化关系曲线来进行表示,此曲线是以转向盘转矩、车速与电机电流的关系而得出的。理想的助力特性能够对转向轻便性与操纵稳定性的关系充分协调,并提供给手动转向与驾驶员一致的路感。
一、微型车电动助力转向系统控制策略设计
EPS主要通过助力特性实现助力控制策略,EPS具有多种形式的助力特性,存在三种典型EPS助力特性,分别为:直线型助力特性、折线型助力特性与曲线型助力特性。直线型助力特性的特点是参数调整方便,实现简单,控制系统设计容易,故广泛应用;曲线型助力实现方法复杂,系统设计也相对偏难,故在实际中应用比较少见;折线型助力特性的优势与缺点介于上述两者之间。
(一)电动助力转向系统设计原则
在设计EPS系统助力特性时,应该符合以下原则:
①在微型车的助力曲线中,由于难以避免转向助力的死区。系统若处于转向盘转矩较小的区域内,是不会存在转向助力的;此外,在汽车处于不同车速时,为保证足够的路感,开始助力的时机也是不同的。
②为保证足够的路感,应随着车速的不同而提供不同助力比的转向助力区。
③为保持转向过程的平稳性,转向助力随转向盘转矩的减小而减小,同理,随转向盘转矩的增大而增大。
④转向助力在转向盘转矩已经抵达事先设定好的限值之前,其值是一直保持不变的,这样就形成了一个稳定的转向饱和区,这个饱和区可以使由于电机的电流过大而导致控制器中的功率器件烧毁等事件的几率大幅度降低。
⑤为了保证方向盘操作力不会出现跳跃感,助力特性曲线各区段过渡要平滑。
(二)电动助力转向系统助力特性的具体设计
对于微型车EPS助力控制策略的设计,核心内容是设计其助力特性,典型EPS助力特性有三种,分别是直线型助力特性、折线型助力特性和曲线型助力特性。结合课题实际开发的要求,通过对比研究上述三种典型助力特性,本文所设计的EPS助力控制采用直线型助力特性。在对EPS助力特性进行设计时,主要对以下两个层面进行阐述:
①电机助力电流和转向盘转矩在某一特定车速下的关系;
②电机助力电流和转向盘转矩在不同车速下的变化关系。
图1所示为典型的直线型助力特性曲线。

图1 典型的直线型助力特性曲线
由图可知,在微型车处于数据行使的某一车速下,且微型车转向盘转矩比门限值Td0的值要小时,系统所提供助力的值为0,也就是说不提供任何助力;而当转向盘的转矩超越了Tdmax门限值的时候,处于保护电机的目的,设置系统助力的值为该车速下所能达到的最大值;当转向盘的转矩处于图中门限值Td0与Td max的数值之间时,转向盘转矩与系统助力之间的变化关系是线性的。对于直线型助力特性,当确定了参数助力增益K(V)以及Td0和Tdmax之后,就可以确定整个助力特性曲线。
结合参考文献[3]中的理论分析结果,并考虑到本文所研究的微型车的实际需要,本文确定以下的参数:Td max=8Nm,Td0=2Nm,则可知助力恒定区的范围在[8,15]Nm,转向助力区的范围在为[2,8]Nm,助力死区的范围在[0,2]Nm,而高于15Nm的时候,系统助力会停止。EPS系统的静态特性与K(V)关系密切,考虑到影响转向阻力的因素很多,难以进行精确确定,所以需要试验调试结合理论分析来确定。
具体到本文所设计的EPS控制器,由于电动助力转向系统是针对小排量微型车的,为了使EPS控制系统设计得到简化,将车辆速度区分为无助力车速区和助力车速区的界限为车速80公里/小时。当微型车处在无助力车速区时,系统助力将取消;而当微型车的行驶处于助力车速区的时候,结合具体的转向盘转矩及车速信号,系统会为车辆确定相应的助力值。
考虑到在实际情况中,高速转向时阻力的变化较小,助力的变化比较缓慢,二低速转向的时候想通阻力变化比较大,助力的变化也较快;本文在具体的设计中,对助力车速区进行区分,共划分为十七个速度区,高速段速度区间取值大而低速段速度区间取值小,在设计中,划分情况的实际值为:当微型车的车速小于20公里每小时的时候,速度区间长度为2.5公里每小时;当微型车的车速高于20公里每小时同时低于50公里每小时的时候,速度区间长度为5公里每小时;当微型车的车速高于50公里每小时同时低于80公里每小时的时候,速度区间长度为10公里每小时,表1所示为详细速度分区情况。
由表可知,这是考虑到微型车在实际行驶中,其行驶速度一般来讲不会总是连续发生变化,最常见的情况是在车辆从一个速度变化到另一速度后,就会在一段时间内维持这个相对稳定的速度。
各速度区间端点处的助力增益系数通过理论分析进行初步的确定,可通过插值的方法获得速度区间内助力增益系数,考虑到插值算法的复杂程度及系统的要求,在本文的设计中,选用二次插值方法(即抛物线插值),插值公式如下:
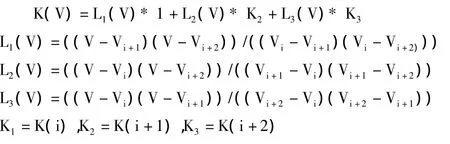
式中,V表示任意车速,i(i=0,1,2…17)表示速度参考点上的相关增益系数;VR代表车速参考点,K(V)的代表处于任意速度之下的助力增益系数,VR=[V0,V1,V2…V17],KR代表车速参考点处助力增益系数,KR=[K(0),K(1),K(2)…K(17)]。
确定微型车助力特性后,结合助力特性曲线函数,即可对系统在任意转向盘输入转矩、任意车速下的电机助力目标电流进行计算。
助力特性曲线函数表达式为:

其中,电机助力电流由Ia表示,电机的最大助力电流由参数Iamax表示,转向盘的转矩由参数Td表示,助力增益系数由参数K(V)表示,可知随车速增加,K(V)会呈现逐步减小的变化趋势;系统在开始助力时,由Td0表示其转向盘转矩,由Tdmax表示最大助力时的转向盘转矩。
二、微型车EPS回正控制策略的具体设计
在微型车操纵稳定性中,转向回正性能是一个非常重要的性能指标。在微型车进行转向时,转向盘在主销后倾角和主销内倾角的作用下具有自动回正功能,而在微型车的驾驶员将转向盘松开时,作用在转向盘上力矩呈现出逐步减小的趋势,随着此趋势,在自动回正力矩的作用下,转向盘将回正。转向盘在理想情况下,由于自动回正力矩的作用,会自行回到中间位置。但由于EPS系统中所增加减速机构和电机等部件,不仅存在着弹性或间隙,还有摩擦和惯性等,有时候会致使转向盘难以做到迅速准确回到中间位置。
为使装备EPS系统微型车回正性能提高,必须控制其回正过程。主要由两部分组成转向盘回正到中间位置的控制策略:一个策略是是低速回正控制,这种控制方式结合具体的低速转向回正过程,在电机上施加一定的外转矩,从而促使转向盘准确迅速的回到中间位置,又称作回正助力控制;另一个策略是高速回正控制,这种控制方式结合高速转向回正过程,以电机对系统所施加的的阻尼作用,在有阻尼的情况下使微型车回到中间位置,从而避免了摆振的发生,又称作回正阻尼控制。
鉴于在微型车EPS产品开发中对系统可靠性的要求较高,本文所涉及的回正控制策略引入的是动力回正控制方案,图2所示为其具体控制模式。
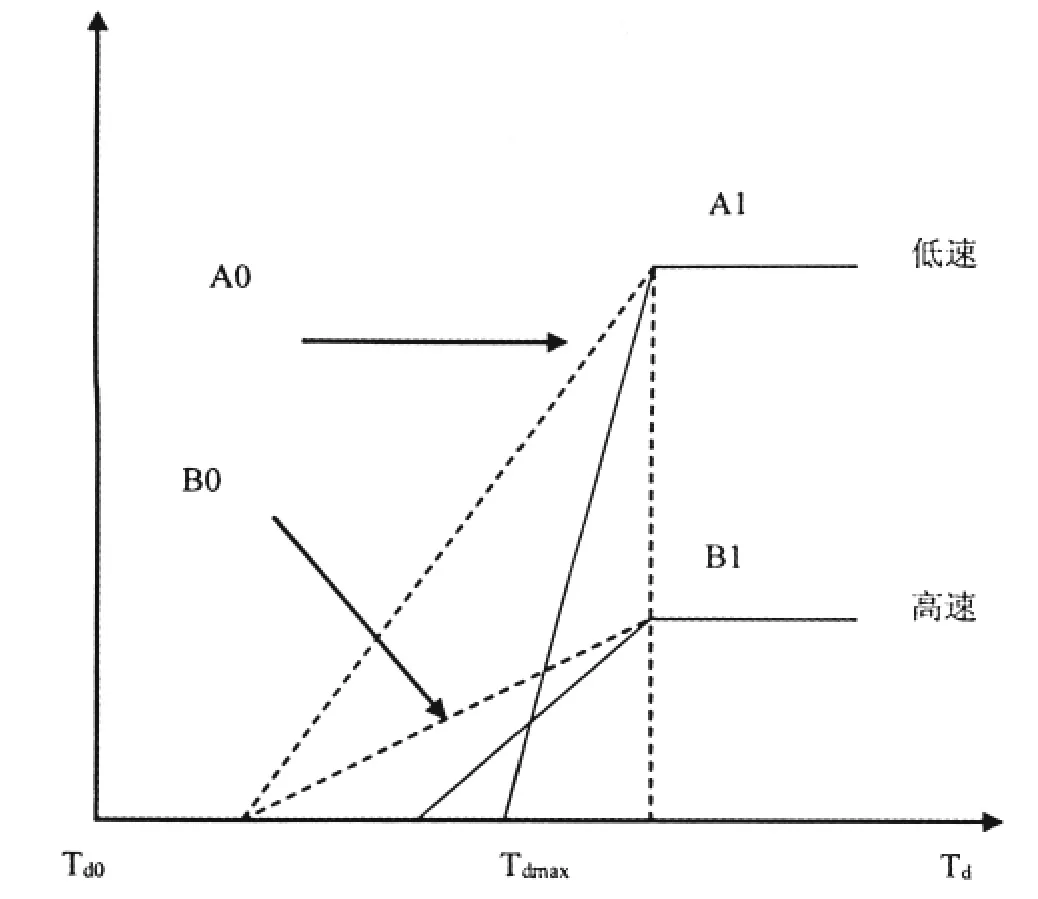
图2 动力回正控制示意图
动力回正控制方案与助力控制策略类似,结合微型车转向回正时的转向力矩,在整个回正过程为其提供成一定比例的回正控制力矩,这种模式可以不计车辆速度的变化,容易实现,实现过程比较简单。
转向盘作用转矩在车辆回正过程中逐渐减小,若仍然按图中曲线AO和BO为助力特性曲线进行控制,可能会导致高速时出现超调,而低速时不能回到中间位置的情况发生。因此,在设计时应注意,要根据回正特性来进行回正控制电机,高速时逐渐衰减助力电流,低速时迅速衰减助力电流,具体阐述如下:
(1)在微型车低速行驶时,为减轻回正操纵力及保证其回正的快速响应,以图中回正曲线Al为模式,采用快速大电流回正;
(2)在微型车高速行驶时,为防止回正超调及提高其回正过程的操纵稳定性,以图中回正曲线Bl为模式,采用慢速小电流回正控制。
三、微型车EPS阻尼控制策略的具体设计
微型车EPS系统中,由于一些惯性如电机、减速机构等的存在,使其惯性大于传统机械式转向系统,转向盘的瞬时角速度当快速转动转向盘时会变得很大,电机在惯性的作用下,当转向盘不再转动后也并未立即停止转动,这种情况易造成车辆的转向过多,会在车速较高时造成非常危险的状况。故当转向盘转动停止的时候,电机也应立即停止转动,需要通过EPS阻尼控制才能实现电机这种快速跟随转向盘停转的性能。EPS系统以阻尼控制的方式,使车辆高速直线行驶稳定性得到提高,使车辆高速行驶时出现横摆振动得到抑制,防止回正超调或转向过于灵敏,并使微型车高速直线行驶时快速转向收敛性有所提高。
在阻尼控制实现方案中,图3所示为其助力电机等效电路图。
图中,电机的端电压表示为:Um=LdI/dt+RIm+E
电机的反电动势可以表示为:E=Kbωm=Kbθm
感应电动势可忽略不计,上式可简化为:Um=RIm+Kbωm
短路电机两端,Um=0,此时得到电机转矩:Tm=KaIm=-KaKbωm/R
其中,Um:电机端电压;Im:电机电枢电流;Tm:电机电磁转矩;L:电机电感;R:电机电枢电阻;Kb:反电动势常数;E:反电动势;Ka:电机特性系数;ωm:电机角速度;t:时间。
由以上分析可知,电机转矩当电机短路时表现为制动力矩,其大小与电机转速成比例,方向与电机转向相反。当引入电机短路的模式实现阻尼控制时,阻碍电机继续旋转的阻尼转矩由电机旋转产生的反电动势形成。通过分析EPS阻尼控制实现方案,当EPS控制器输出PWM信号使电机短路时,电机转矩的作用即为制动力矩。本文的设计中,使功率管FET1和FET2在控制器输出PWM信号作用下同时导通,从而实现短路电机,控制电机阻尼转矩。
四、转向盘转角估算算法的具体设计
上述EPS阻尼控制及回正控制实现方案中,均涉及到转向盘转角的计算,若装备有转角传感器在EPS系统中,转向盘转速可通过对转角传感器信号进行微分来获取;若没有装备转角传感器在EPS系统中,则需要进行预估,下面说明根据利用现有的传感器信号,以电机的电压和电流参数对电机角速度进行估计,转向盘转角可以通过积分环节估计得到:
由式Um=RIm+Kbωm可得:

转向盘角速度:ωsw=ωm/Gr
则θs=ωSW=ωm/Gr
对上市两段进行积分,即可得到转向盘转角的值,并用于确定阻尼控制及回正控制相关控制量。
[1]Y Tokunoto,M.Shiba.Development of Next-Generation Steering Sensor for Electric Power Steering[J].KOYO Engineering Journal English Edition,2008,(165):20-24.
[2]Yuji Kouzaki,Goro Hirose,etc.Electrical Power Steering(EPS)[J].NSK Motion&Control,2009,(6):9-15.
[3]肖生发,玛樱,刘洋.电动助力转向系统助力特性的研究[J].湖北汽车工业学院学报,2001,1S(3):34-37.
2011-02-22
池保忠(1978-),男,江苏常熟人,讲师,工程师,硕士。
