基于EtherCAT协议现场级实时以太网控制系统研究
2011-09-07李木国王晓亮
王 磊, 李木国, 王 静, 王晓亮
(1.大连理工大学电信学院,辽宁大连116024;2.河南理工大学计算机科学与技术学院,河南焦作454000;3.大连理工大学海岸和近海工程国家重点实验室,辽宁大连116024)
0 引 言
目前,成为国际标准的工业以太网协议有十余种,其中有6种典型的实时工业以太网总线在市场上相互竞争,这包括:Ethernet/IP、Profinet、EtherCAT、Ethernet PowerLink、Modbus/IDA和EPA。国内外学者也对这些协议进行了大量的应用研究[1-2],并设计开发了不同应用背景下的现场级网络控制系统[3-6]。但是,其中Ethernet/IP和Modbus/IDA是在TCP/IP协议应用层上实现的实时数据交换[7],这种方式只能应用于100ms以上的应用场合;EthernetPowerLink、Profinet和EPA是通过在数据链路层上采用适当的优先级调度方案来保证实时性[7],但只能保证最低5-10ms的实时通信[8];而EtherCAT采用的是集总帧的调度方式,在数据链路层和物理层都做了相应的可以实现微妙级的高实时性通信[9]。
因EtherCAT协议独特的特性,它能够使以太网延伸至现场级通信控制,特别适合大数据量、高实时性的I/O通信应用。本文设计提出的基于EtherCAT协议的现场级实时控制系统的设计方案,分析了在主从式结构下主站和从站的具体实现,针对海洋环境大数据量的浪高监测设计了相应的软件及硬件,从而利用该平台对EtherCAT协议的性能进行实验验证、分析。
1 EtherCAT协议特点及系统总体设计
1.1 EtherCAT总线特性
EtherCAT协议采用与标准以太网共享帧的方式工作。Ether-CAT总线数据帧填充到标准以太网帧的数据段部分,通过类型标识符域的十六进制数88A4与其他以太网帧类型相区别。这种特性使得它很容易实现与标准以太网的兼容。此外,Ether-CAT协议规定上位主机(主站)与监控分站一起构成一个封闭的环,如图1所示。
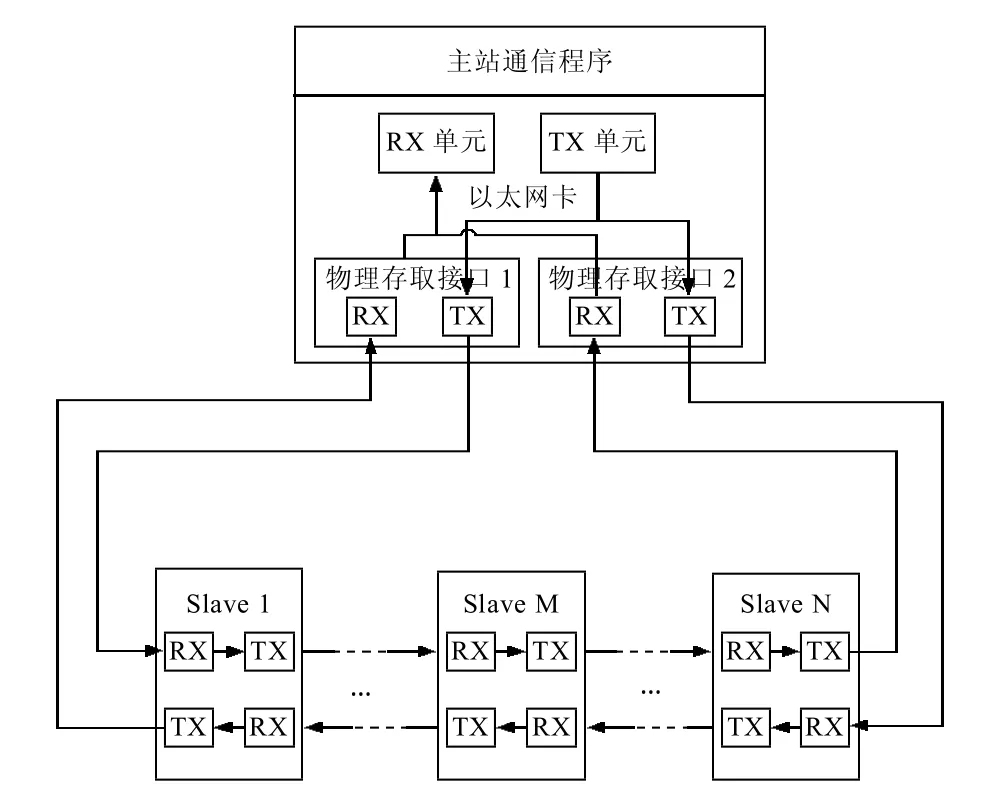
图1 EtherCAT协议工作原理
携带从站地址的标准以太网数据帧从主站出发,逐个访问环路上的从站。由于从站接口芯片的独特结构,当数据帧到达时,从站接口芯片就会把从主站输出数据从以太网帧的数据部分取下来,或把输入主站的数据插入到以太网帧的相应数据域位置,然后再把整个以太网帧转发到下一个从站,直到最后一个从站,数据帧才返回主站处理。在此过程中无需像其它工业以太网总线协议那样对数据帧编码/解码,使得数据处理时间大大缩短,每个从站数据处理延迟仅为十几纳秒。此外,由于EtherCAT协议支持将连接到网络上的所有从站存储区统一分配一个唯一的逻辑地址,每个从站通过接口芯片特殊的现场存储管理单元结构实现逻辑地址到本地存储器物理地址的映射,因此可以根据监控的需要对每个EtherCAT的数据帧做合理的规划,从而实现在一次数据帧回还过程中对多个从站,多通道数据的读取。
1.2 系统的总体结构
如图2所示,本系统硬件主要包括:EtherCAT网络接口电路、核心处理器单片机电路外围数据监测A/D转换电路及信号放大滤波等处理电路、多路开关和浪高仪传感器;软件则为数据采集和通信程序。系统设计了10个从站,从距离上位计算机最近的从站开始编号,每个从站连接32个浪高仪,实现32个通道的浪高数据监测,所有浪高仪编号为1#~320#,从而使得主站程序能够单独监测任意1个通道数据或任意几个通道组合的数据。

图2 系统总体结构
2 系统详细设计
2.1 单个从站的硬件构成
单个从站硬件原理框图如图3所示,在本系统中采用的核心单片机控制芯片为PIC24HJ256GP610,它的指令执行速度能够达到40Mbps,内部具有两个SPI通信模块,使用模块1与网络接口芯片ET1100通信,用模块2与速度为3MSPS的A/D转换器通信。此外用通用接口 RB0~RB3作为第一级多路开关1、2的通道选择信号,RF0~RF1分别作为开关2、1的片选信号;用RD0~RD1作第二级多路开关3的通道选择信号,RD3为芯片使能信号。

图3 单个从站硬件原理框架
2.2 从站网络接口结构
如图4所示,接口芯片主要包括:一个容量为8K的双口RAM存储器,前4K地址分配给寄存器,剩余的4K空间用于邮箱和周期性过程数据通信;16个同步管理器单元,用于对双口RAM存储区根据需要进行分配,同步管理器0和同步管理器1分别用于邮箱输出和输入存储器分配管理,同步管理器2和同步管理器3分别用于过程数据输出和输入存储区分配管理;16个现场存储器管理单元,用于实现存储器物理地址到逻辑地址的映射。

图4 从站接口芯片结构框架
2.3 从站数据字典
为了在网络通信应用层实现标准的输入/输出数据读写操作,设备行规定义了标准的数据读写标识,标识规范了用于通信的数据类型、地址对应关系形成了以XML文件形式表示的数据字典。在数据字典中每个PDO(过程数据对象,实时的周期性数据)有一个标准的主索引和多个子索引,输入主站的 PDO主索引为十六进制数据:0x1600,0x1601,…,0x16FF,共可达256索引值;输出主站的PDO主索引为十六进制数据:0x1A00,0x1A01,…,0x1AFF,也为 256 个索引值。每个PDO数据以实体的方式进行读取,每个实体分配了一个标准的索引值。在本系统设计中,数据字典对象分配如表1所示,每个监测量为1个16位的整数值,对应一输入对象索引值,如表1所示。
根据以上数据对象字典的定义,通过同步管理器管理从站接口的物理存储器,每个同步管理器管理接口芯片一段连续的存储区,该存储区可以存放多个PDO。
2.4 主站数据监测的实现
运行上位机应用程序,选择需要监测的通道,主站通信程序获得需要读取的通道号,根据XML文件规定组装数据帧,等待数据发送。主站应用程序为了使通信能够安全、可靠的进行,主站在如图5所示状态机的作用下实现数据通信。

图5 EtherCAT状态机
状态机依次在不同的状态及状态转换期间完成不同的任务:在初始化状态及向预操作转换(IP)期间,主站程序配置数据链路层信息寄存器、地址寄存器并且设置应用层控制寄存器,配置用于邮箱通信的同步管理器通道,初始化分布时钟寄存器,之后等待从站应用层确认;在预操作状态及预操作向安全操作转换(PS)期间,实现邮箱通信,主站配置用于过程通信的同步管理器寄存器、现场存储器管理单元寄存器、应用层状态请求寄存器,同时请求状态转化,等待状态确认;在安全操作状态及安全操作向操作转换(SO)期间,继续邮箱通信,实现输入数据通信,发起状态转换请求并等待状态确认;在操作状态期间,实现输入输出数据的通信操作。在安全操作期间主站发送读通道请求数据帧,该数据帧发送给从站要读取的通道编号值,从站响应主站要求,打开相关的多路开关采集需要读取相关编号的传感器采集的浪高数值。接下来,主站发出与以上类似的接收数据的数据帧,读输入数据的数值。因此,主站通过发送两次数据帧就能实现任意数量传感器数据一次性采集,最大限度的保证采集的速度。
3 系统测试及结果分析
为了对比分析系统的性能,考虑两种典型情况即:主站加1个从站和主站加多个从站,在实验室条件下对这两种结构的系统性能分别进行了测试。

表1 数据字典索引
首先,将信号发生器产生的幅值为1V,频率为10Hz的信号接到3个从站的前两个通道即:第1个从站的1,2号通道,第2个从站33,64号通道,第3个从站65,96号通道,在主站测得的信号波形如图6所示,可以看出主站获得的波形比较平滑。
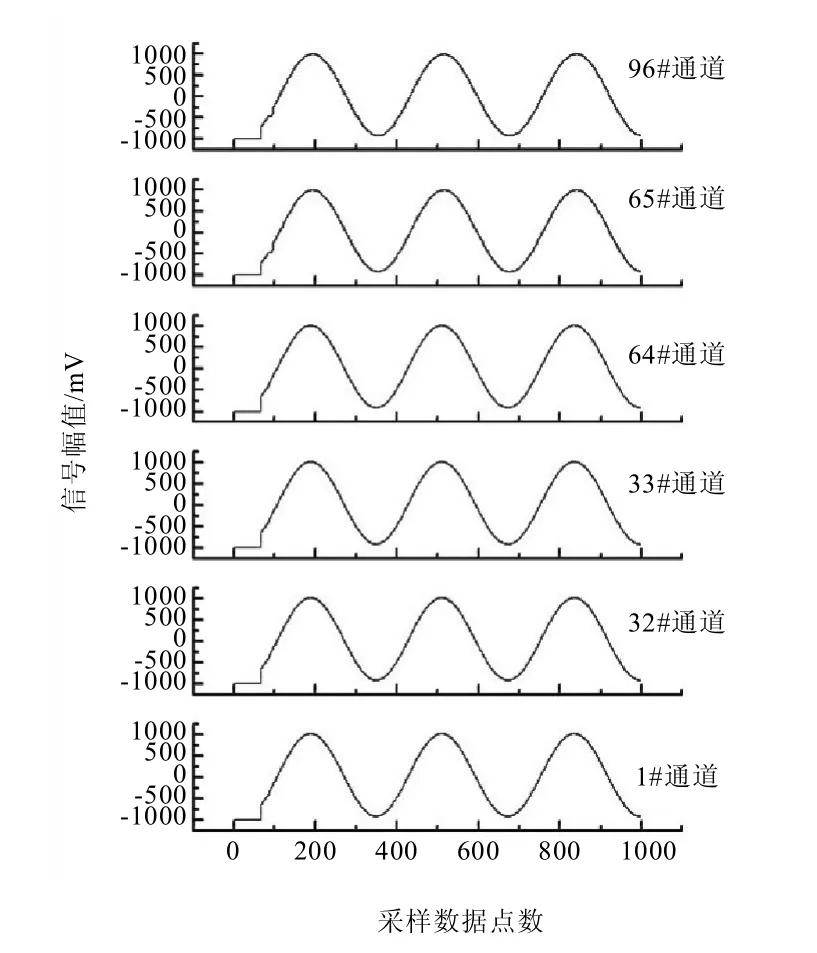
图6 3个从站的前两个通道采集的信号波形
接下来采用同样的信号测试系统分别对连接1个从站、2个从站和3个从站情况下的响应时间进行测试,测试结果如图7所示,从图7中可以看出响应时间主要分布在250 s左右,另外,从站数量的增加对系统响应时间几乎没有影响。

图7 系统响应时间
为了进一步验证系统的性能,对包含3个从站系统做了10组测试,给出1000个数据点平均响应时间如图8所示,从图中可以看出采集的10组数据点响应时间最小值为256.4 s,而最大值为258.8 s,波动差值仅为2.4 s,这在大多数的数据监控系统中基本上可以忽略不计。

图8 10组数据点平均响应时间
4 结束语
EtherCAT协议因其采用特殊的硬件结构及优化的协议规范尤其适用于大容量高实时性的现场级数据采集与监控。本文通过构建海洋浪高数据采集与监控系统,通过对单个从站和多个从站的实验测试表明,系统性能在协议规定带载范围内,不受采集通道数影响,响应时间不但达到微秒数量级,而且波动非常小,适用于大多数有高实时性要求的现场数据监控场合。同时,由于EtherCAT协议采用独特的数据帧调度形式,一次能够传输高达1498个字节的数据,使得系统也适用于大量数据传输的I/O应用中。此外,由于采用结构化设计方法,通过修正数据字典和主站程序即可实现更多通道数的扩展,从而可以通过简单的改进应用于现场级的监测监控场合。
[1]曹怀虎,余镇危,王磊,等.以太网DCS中基于MODBUS/TCP协议通信的设计与实现[J].计算机工程与设计,2004,25(2):314-317.
[2]张永德,白硕.基于PROFINET的开放式以太网控制器的设计[J].计算机工程与设计,2010,31(7):1458-1461.
[3]朱春鸯,郭其一.地铁车辆车载设备火灾状态识别报警网络系统[J].计算机工程与设计,2009,30(21):5025-5030.
[4]刘暾东,谢维盛,蔡岗全.Ethernet/IP通信适配器的设计与实现[J].仪器仪表学报,2008,29(18):2220-2224.
[5]石成华,杨彬,王文亮,等.智能阀门定位器EPA高速通信模块的开发[J].仪表技术与传感器,2009(12):75-77.
[6]张茁,孙洁.基于以太网的智能家庭网络系统设计[J].计算机工程与设计,2005,26(11):3133-3134.
[7]胡立坤,王庆超.基于以太网通信过程的实时改进方法研究[J].计算机工程与设计,2006,27(9):1516-1520.
[8]党安喜,裴少婧,尚耀东,等.以太网时延仿真与性能分析[J].计算机工程与应用,2009,45(2):119-121.
[9]李木国,王磊,王静,等.基于EtherCAT的工业以太网数据采集系统[J].计算机工程,2010,36(3):237-239.
