两轮不平衡小车变结构控制抖振与鲁棒性研究
2011-07-02何雅静屈胜利孟祥忠
何雅静,屈胜利,孟祥忠,秦 星
(西安电子科技大学,陕西 西安 710071)
两轮不平衡小车是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统。它的动力学方程是一个多变量、耦合、时变的非线性高阶方程,加上运动学方程中的非完整约束,使它成为一个具体的、实现起来相对简单的系统。近年来,两轮不平衡小车作为一个理论与实践相结合的系统,受到高度重视,它是检验各种控制方法处理能力的典型装置[1]。针对以往[2]通过反馈线性化得到小车系统的线性模型,然后在指数趋近律基础上进行变结构控制的方法,消抖效果并非很好,而且在削弱系统抖振的同时也削弱了系统的抗干扰能力。为此,本文首先基于饱和特性的准滑模指数趋近律设计出了常规切换面滑模控制器和动态切换面滑模控制器。该控制器较以前的方法更有效地削弱了系统的抖振;然后通过给饱和特性的准滑模指数趋近律中加入扰动跟踪项,设计出了带扰动跟踪项的动态切换面准滑模控制器。该控制器不仅很好地削弱了系统抖振,增大了系统的可控范围,更重要的是很好地保证了系统的鲁棒性。
1 小车系统建模及其反馈线性化
设电机的力矩系数为 km,反电动势常数为 ke,电机电阻为 R,转子惯量为 J,接入减速箱的减速比为 kj;小车车体质量为Mp,车轮及轴的质量为Mw,车体质心到车体转动中心距离为l,车轮半径为r,车体转动惯量为Ip,车轮及轴转动惯量为Iw,重力加速度为g,车轮水平位移为x1,水平速度为 x2,车体偏离垂直方向的角度为 x3,偏离垂直方向角加速度为x4,整个系统的输入即电机的输入电压为u。
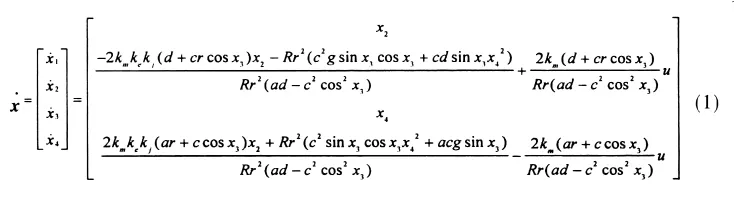
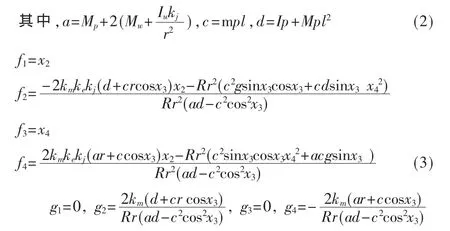
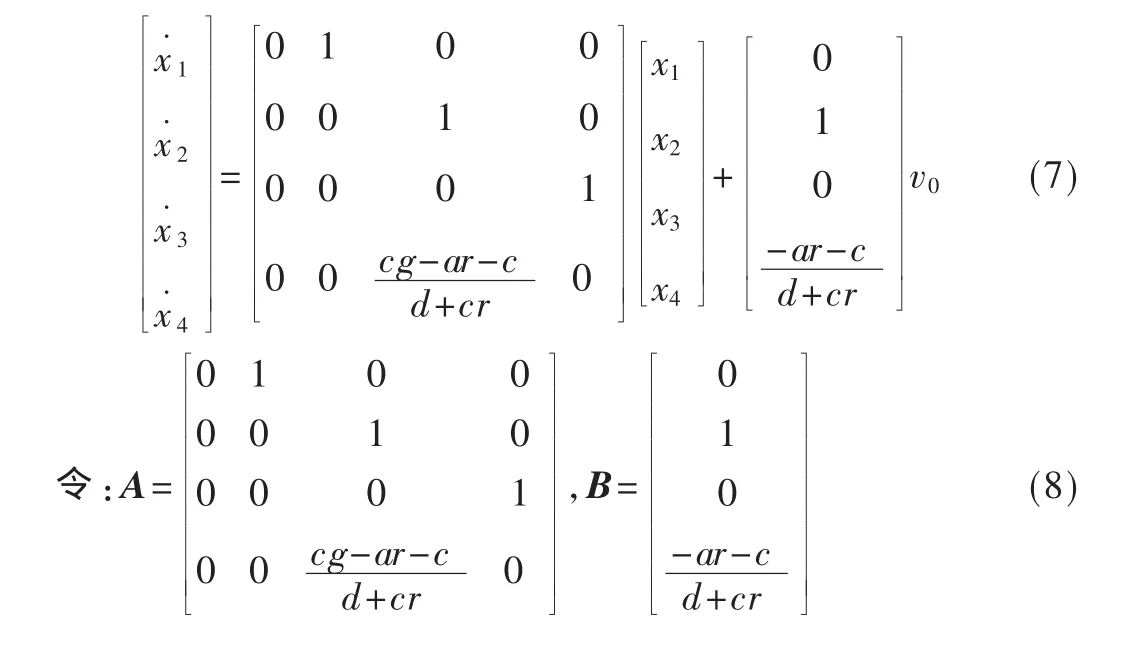
取状态变量X[x1x2x3x4]T,将电机的输入电压u作为控制信号。为了便于研究,把系统看作线性化的单输入单输出系统。由于角度对系统的影响最大,所以将角度x3作为输出,它可由倾角传感器测得[1]。根据力学建模得到系统的非线性方程为[3]:
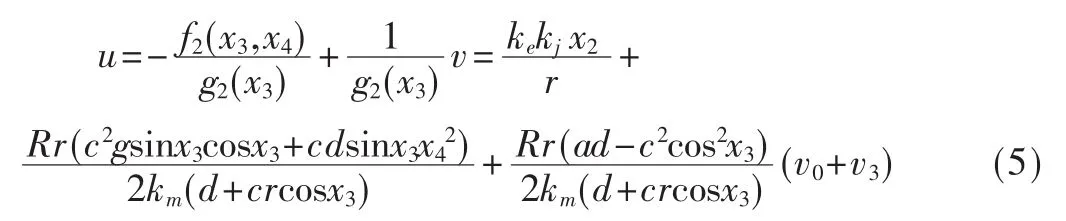
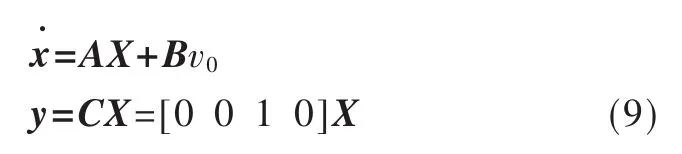
由“相对阶定理”得知:该小车模型只能局部线性化。采用“李理论”方法,根据非线性控制理论[4],取反馈控制律 u:

其中v(x)是u的扩展输入。为了设计方便,取Φ(X)=x1,令,v=v0+x3由式(3)、式(4)得非线性状态反馈控制器:
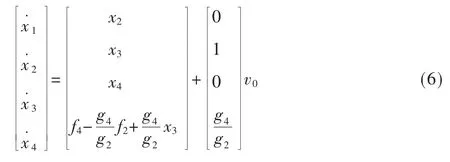
将式(5)代入式(1),可得:
2 不平衡小车的变结构控制器设计[5-7]
为验证小车系统可控,通过式(8)设计 LQR(线性二次型最优)控制器,得到状态反馈阵:

准滑动模态是指系统的运动轨迹被限制在理想滑动模态的某一领域(滑动模态切换面的边界层)内的模态。在边界层内,准滑动模态不要求在切换面上进行控制结构的切换,这就已经从根本上削弱了抖振。取饱和特性的准滑动模态指数趋近律为:

其中,M0为系统趋近切换面的速度,当 M0很小时,调节过程太慢;当M0较大时,到达切换面时系统速度较大,必然引起抖振。线性项保证系统的运动轨迹按指数趋向切换面,从而保证过渡过程有较好的品质,减小抖振。
2.1 基于常规切换面的准滑模控制器的设计
根据变结构理论,常规切换面的选取只依赖于系统的状态,而与系统的输入无关。对于本小车系统,设其切换面为:
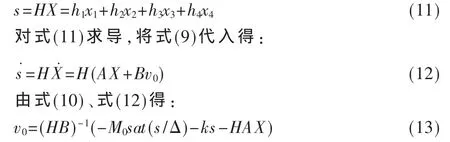
联立式(5)、式(10)可得到基于常规切换面的准滑模控制器:

由式(5)可以看到:不连续项 M0sat(HX/Δ)直接含在控制u中,当系统运动到滑模区时,会在不同的控制之间来回切换,引起抖振。
2.2 基于动态切换面的准滑模控制器的设计
根据变结构理论:动态滑模切换面使切换函数与系统控制输入的一阶或高阶导数有关,这样可将不连续项转移到控制的一阶或高阶导数中去,得到在时间上本质连续的动态滑模控制律,从而降低抖振。
针对小车系统,设计其动态切换面为:

准滑模指数趋近律仍为:

对式(15)求导,将式(9)代入,并联立式(16),同 2.1节的计算方法,可得:

对式(17)积分代入式(5),即得到基于动态切换面的准滑模控制器:

显然,动态切换面是在常规切换面中加入与控制输入有关的Tv0项,使得不连续切换项M0sat(HX/Δ)转移到控制的一阶导数v˙0中。因为控制u中不存在不连续切换项,所以有效地降低了抖振。
2.3 带扰动跟踪的动态滑模控制器的设计
由于以往的方法在消抖的同时也削弱了系统的抗干扰能力,而扰动的存在会恶化系统的性能。在滑模控制中,扰动会使本来位于滑动面的运动偏离滑动面。从几何学角度可以将该扰动分解为两个方向:沿滑动面的切线方向和垂直于该切线的法线方向。从物理学角度,分解在沿滑动面切线方向的扰动将给系统一个继续沿滑动面运动的加速度,它对系统的影响不大;而分解在垂直于滑动面方向的扰动会给系统一个垂直滑动面方向的加速度,也就是扰动引起系统在滑动面垂直方向上产生远离滑动面的加速度,使系统脱离滑动面。为了避免扰动造成系统运动偏离滑动面过大,本文在饱和特性的指数趋近律中加入扰动动力跟踪项来减小系统远离滑动面运动的加速度,以增强系统的抗干扰能力。
根据上面的分析,扰动会引起系统在垂直滑动面方向的加速度,故根据位置加速度计测得的位置加速度x˙1在垂直滑动面方向的分量 λx¨1(0≤λ≤1)来克服扰动在垂直滑模运动方向上的加速度。在基于饱和特性的准滑模指数趋近率基础上设计带扰动跟踪项的趋近律为:
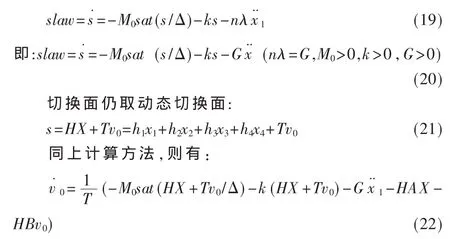
对式(22)积分,代入式(5),得到带扰动跟踪项的动态切换面滑模控制器:

3 仿真比较[8]
由maxon电机手册得到:额定电压为30 V,力矩系数km=0.0389 Nm/A,电机电阻R=1.23 Ω,转子惯量J=0.000 065 5 kgm2,反电动势常数ke=1/246=0.004 065 V/rpm,接入减速箱的减速比 kj=33,测量得小车车体质量为Mp=10.36 kg,车体质心到车体转动中心距离l=0.2 m,车轮及轴质量Mw=0.4 kg,车轮半径r=0.06 m,车轮及轴转动惯量Iw=0.000 36 kg·m2,车体转动惯量 Ip=0.037 59 kg·m2,取重力加速度g=9.81 N/kg。
3.1 可控范围的比较
取 M0=20,k=10,T=0.5,G=0.3,在小车位置、速度、角速度全都为0的情况下,通过不断变换角度初始值,观察控制电压为额定值时的角度值即为小车在此控制器下的最大可控倾角。仿真得到如表1所示的三种控制器的最大可控倾角。
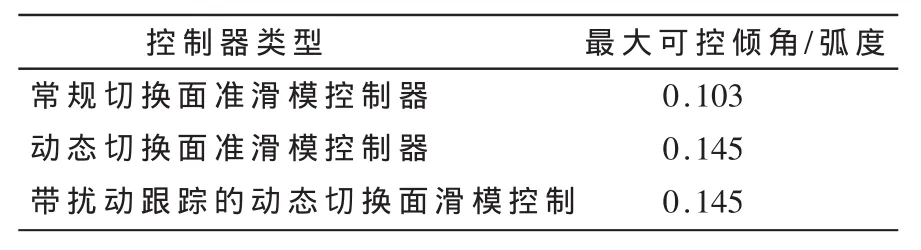
表1 三种控制器的最大可控角
由表1可以看出,系统在带扰动跟踪项的动态切换面滑模控制器作用下的可控角最大,动态切换面准滑模控制器次之,而常规切换面准滑模控制器作用下系统的可控角最小。下面对三种控制器控制效果的比较都在其倾角可控范围内。
3.2 系统抖振的比较
根据变结构理论:系统运动在滑模区时,其特性和参数只取决于切换函数而与其他无关,即滑模具有完全鲁棒性。但伴随滑模的运动,系统会出现抖振,这种高频振动会严重影响系统的性能。下面就上文所设计的三种不同控制器作用系统时所产生的抖振进行观察比较。
仍取初始状态X=[0 0 0.45 0]T,其他参数不变,在三种不同控制器控制作用小车角度在10 s内的响应曲线如图1示。
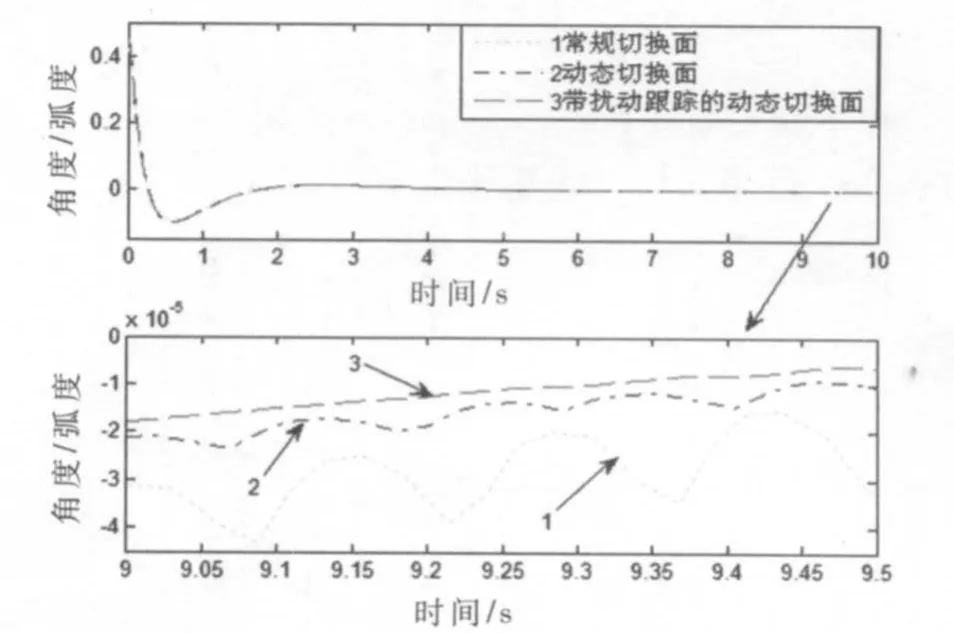
图1 小车角度响应的比较
由图1可看出,在三种不同控制器的作用下,系统的位置、速度、角速度以及控制u响应曲线都有图1所示的特性,即动态切换面滑模控制器比常规切换面滑模控制器在消抖方面有明显的优势,而带扰动跟踪的动态切换面滑模控制器比不带扰动跟踪的动态切换面滑模控制器在消抖方面有明显的优势。
3.3 系统抗干扰性比较
设小车位于平衡状态X=[0 0 0 0]T处,给系统的控制输入端u处加入幅值为5的随机干扰信号,在上述三种不同控制器作用下小车速度在3 s内的响应曲线如图2示。
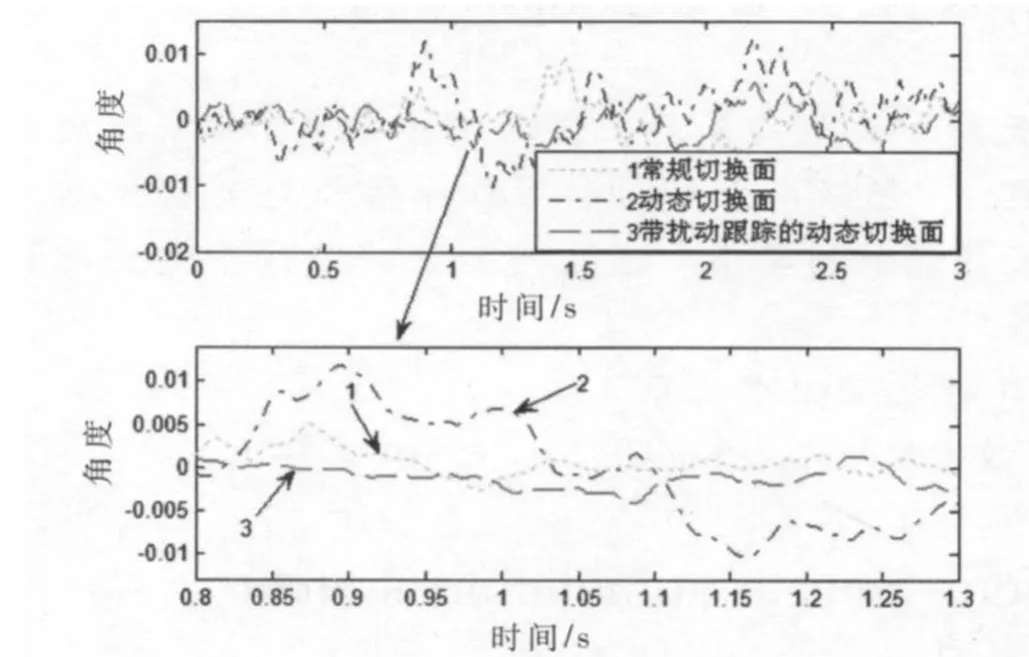
图2 干扰作用下的小车角度响应比较
由图2可看出,对于系统角度,动态切换面滑模控制器作用下系统的抗干扰能力比常规切换面滑模控制器作用下系统抗干扰能力弱很多,但是通过增加扰动跟踪项,可使动态切换面滑模控制器的抗干扰能力又得以显著地增强。
大量仿真曲线表明:对于相同的趋近律,与常规切换面滑模控制器相比,动态切换面滑模控制器虽然显著地削弱了系统的抖振,但同时也削弱了系统的抗干扰能力。而通过给趋近律中加入扰动跟踪项设计的带扰动跟踪的动态滑模控制器作用系统时,不仅显著地削弱了系统的抖振,而且保留了常规切换面滑模控制器较强的抗干扰能力。由此可见,扰动跟踪项不但很好地补偿了变结构控制的抖振缺陷,而且还实现了系统对扰动的不变性,增大了系统的可控范围。
本文针对反馈线性化得到的小车系统线性模型,设计了基于常规切换面和动态滑模切换面的准滑动模态变结构控制器,并在此基础上通过给控制u中加入扰动跟踪项,设计出能同时削弱抖振和保证系统抗干扰能力的控制器,实现了小车的稳定控制。通过仿真比较可以看出,与常规切换面控制器作用相比,在基于动态切换面控制器作用下系统的可控范围较大、抑制系统抖振能力强,但同时系统的鲁棒性变差,即在削弱系统抖振的同时也削弱了系统的鲁棒性。而通过给控制u中加入扰动跟踪项使系统抗干扰能力显著增强,即具有扰动跟踪的动态滑模控制器不仅更好地削弱了系统的抖振,同时还保证了滑模对扰动的不变性,实现了滑动模态鲁棒性和消除抖振的统一。
[1]Li Yanzhao,Qu Shengli,Zhu Jiahui,et al.Study on the control of a two-wheeled unstable vehicle based on sensitivity Analysis[M].The University of Western Australia School of Mechanical Engineering,IEEE,2009.
[2]OOI R C.Banlancing a two-wheeled autonomous robot[M].IEEE,2003.
[3]朱加辉.两轮自平衡小车反馈线性化及变结构控制研究[D].西安:西安电子科技大学,2010.
[4]胡跃明.非线性控制系统理论与应用[M].北京:国防工业出版社,2005.
[5]高为炳.变结构控制理论基础[M].北京:中国科学技术出版社,1990.
[6]姚琼荟.变结构控制系统[M].重庆:重庆大学出版社,1997.
[7]赵勇.两轮不稳定机器人载体运动学及动力学变结构控制研究[D].西安:西安电子科技大学,2007.
[8]黄忠霖.控制系统MATLAB计算及仿真[M].北京:国防工业出版社,2004.
