对船舶在能见度不良时行动规则的理解
2011-06-07辽宁海事局许臣峰
辽宁海事局 许臣峰
对船舶在能见度不良时行动规则的理解
辽宁海事局 许臣峰
在能见度不良时,船舶间碰撞事故频频发生,船舶没有使用安全航速、没有遵守能见度不良时的行动规则进行避让是重要原因之一。对船舶在能见度不良时的行动规则的理解和避让进行分析和探讨,希望能够避免船舶在能见度不良时发生碰撞事故,进一步对保障船舶航行安全起到应有的作用。
能见度不良;避让行动;船舶;行动规则
《1972年国际海上避碰规则》主要以能见度的不同来确定船舶的行动规则,其内容主体是第二章“驾驶和行动规则”。第二章中分为三节,分别是船舶在任何能见度情况下的行动规则、船舶在互见中的行动规则和船舶在能见度不良时的行动规则。
从内容和篇幅上看,船舶在任何能见度情况下的行动规则包括7条内容,船舶在互见中的行动规则包括8条内容,而船舶在能见度不良时的行动规则仅1条内容,也就是大家熟悉的第19条。虽然只有一条,但是它的重要性丝毫不比其他章节差,本文通过对第19条“船舶在能见度不良时的行动规则”的理解,探讨船舶应该如何采取避让行动更为合适和有效。
一、海面能见度和碰撞事故的特点
在航海实践中,能见度有良好的情况,此时视线清爽,视程较远,往往超过5 n mile;也有能见度不良的情况,此时视程仅0.5 n mile甚至连本船的船头都无法看到。除此之外,也经常遇到能见度介于良好和不良的中间模糊状态,例如海面因为雾、霾、雨、雪等原因,视程为1~2 n mile,甚至视程有忽远忽近的情况。
而在事故调查处理实践中,不存在能见度介于良好和不良的中间地带,对于海上能见度的判断只有能见度良好和能见度不良两种情况,但作为船舶驾驶员而言,偏于安全的做法是把这样的模糊状态当做能见度不良来对待。可见,《1972年国际海上避碰规则》第二章第三节第19条“船舶在能见度不良时的行动规则”虽然仅为1条,不如第二节的8条内容多,但是它明确约束着大多数情况下船舶的避让行动。
通过对近几年的海事调查统计得出,海上交通事故中船舶碰撞事故占到一半以上(占50%至65%),而船舶碰撞事故特点也比较突出,大多数碰撞事故发生在能见度不良的气象条件下,多发生在夜间(22:30至凌晨02:30),而且碰撞发生时船舶几乎都是全速行驶。这说明有些驾驶员对于船舶在能见度不良时的行动规则的理解有偏差,也没有很好地遵守规则第19条的规定。
二、对于能见度不良行动规则的理解
第19条“船舶在能见度不良时的行动规则”共分为5款,其中第1款规定:“本条适用于在能见度不良的水域中或在其附近航行时相互看不见的船舶。”这说明适用本条规定的船舶,在能见度不良的水域中或在其附近的船舶航行时都应该遵守本条各款的规定。
(一)能见度不良时,安全航速仅意味着减速
第2款规定:“每一船舶应以适应当时能见度不良的环境和情况的安全航速行驶,机动船应将机器作好随时操纵的准备。”
显然,前半句话的重点要素是安全航速。对于安全航速,大家都认为其是一个比较模糊的概念。没有一个固定的数值来表明航速是否安全,不同类型的船在不同的水域航行,安全航速都是不一样的,故大多数人认为安全航速对船舶没有约束和限制,甚至认为在有些特殊情况下,船速越快才越安全。
避碰规则第六条对安全航速这样描述:所有的船舶在决定安全航速时,考虑的首要因素都是能见度情况,目的是能在适合当时环境和情况的距离以内把船停住。19条第3款规定:“在遵守本章第一节各条时,每一船舶应适当考虑到当时能见度不良的环境和情况。”这也是在对我们进行又一次的提醒,驾驶员在操纵船舶时,要使用符合能见度不良时的安全航速,尽管规则没有指明,但不难理解此时安全航速的含义就是应该减速,而不是保持航速或加速。
“机动船应将机器作好随时操纵的准备”可以理解为备车。因此,19条第2款的精神体现了四个字——“减速、备车”。
对于安全航速而言,因为没有给出一个确定的数值,往往会给船舶造成一种保持当前航速的错觉,从而不采取减速进行避让,这往往是船舶不能在适合当时环境和情况的距离以内把船停住的原因和隐患。
(二)船舶在能见度不良时的转向避让
19条第4款规定:一船仅凭雷达测到他船时,应判定是否正在形成紧迫局面和(或)存在着碰撞危险。若如此,应及早地采取避让行动,这种行动如包括转向,则应尽可能避免如下各点:
(1)除对被追越船外,对正横前的船舶采取向左转向;
(2)对正横或正横后的船舶采取朝着它转向。
可以看出,当船舶在能见度不良仅凭雷达测到他船时,应及早地采取避让行动,所采取的避让行动包括转向,如何理解“包括”的含义呢?显然是说,在及早的时候,避让行动可以是减速、减速加转向和仅为转向这3种措施。如果采取转向避让,还有2点需要避免,因为如果不避免的话,船舶之间的距离会越来越近,发生碰撞危险的可能性越来越大。
在实践中,船舶仅凭雷达发现他船的情况是十分常见的。事故调查发现,船舶在这种能见度不良情况下遵守规则的情况令人担忧。从2010年船舶在老铁山海峡能见度不良时发生的几起碰撞事故看,船舶既未及早地采取行动,也未进行减速避让,而是全速行驶,直到碰撞前才采取了转向措施,可惜为时已晚,不能“在适合当时环境和情况的距离以内把船停住”。
如何理解船舶在能见度不良时的转向措施呢?分析多起碰撞事故调查的案例发现,船舶通过雷达观察对方动向,直到碰撞前才采取转向行动,而且转向时由于情绪紧张也没有考虑应该避免的两点注意,事实证明这些转向行动往往无法起到避免和预防船舶碰撞的作用。不是说船舶在能见度不良时不应采取转向进行避让,而是转向避让应及早,如果错过了及早,那么就是盲目的。例如,许多驾驶员在浓雾中紧盯雷达,直到与来船相距仅0.5 n mile时才采取转向措施,此时已经于事无补。这样的案例很多。
(三)最后的避让
如果船舶错过了及早地采取避让行动,第19条第5款作了这样的规定:“除已断定不存在碰撞危险外,每一船舶当听到他船的雾号显示在本船正横以前,或者与正横以前的他船不能避免紧迫局面时,应将航速减到能维持其航向的最小速度。必要时,应把船完全停住,而且,无论如何,应极其谨慎地驾驶,直到碰撞危险过去为止。”
分析第5款可以看出,如果“听到他船的雾号显示在本船正横以前”,可以表明两船的相对方位和大概的距离,也就是说,此时采取措施,很大程度上表明船舶已经错过了“及早地”时间范围内;而如果“与正横以前的他船不能避免紧迫局面时”,则明显表明两船距离过分接近。此时采取避让措施已经不能被称为是“及早地”了,而是一种紧急的、最后的避让,即减速到维持舵效,甚至倒车。
在避碰规则附录三“声号器具的技术细节”中,对笛号的声强和可听距离进行了规定。
船上所装的号笛,在其最大声强方向上、距离1 m处,在频率为180~700 Hz(1%误差范围、长度20 m或20 m以上的船舶)或180~2100 Hz(1%误差范围、长度20 m以下的船舶)范围内的至少每个1/3倍频道宽中,应具有不小于表1所定相应数值的声压。
表1中的可听距离属于号笛前方轴线上参考性、典型性的数值,是在无风条件下、在一般背景噪声的船上90%的概率可听到的大约距离。实际上,号笛的可听距离主要取决于天气情况,在强风或周围有高背景噪声的情况下,可听距离就会大大减小。
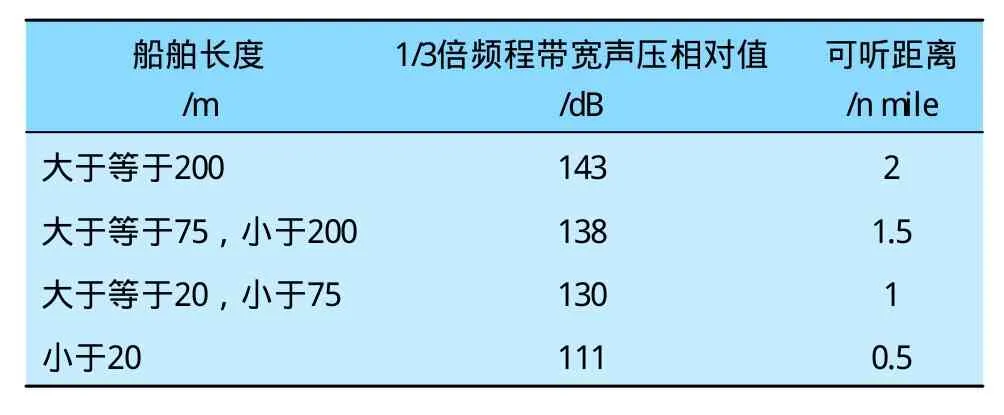
表1 1/3倍频程带宽声压相对值及可听距离

对于大多数船舶(船长大于75 m)而言,如果“听到他船的雾号显示在本船正横以前”,则两船最多相距1.5~2.0 n mile,甚至更小。在两船相距1.5~2.0 n mile时还没有采取避让措施,就基本丧失了“及早地”避让的有利时机。
综上所述,船舶在能见度不良情况下采取避让行动时,如果想采取转向进行避让,一定要“及早地”采取转向行动,同时还要注意避免两点:如果错过避让时机,没有做到及早避让,那么就应该减速避让,甚至倒车停船;如果错过了“及早地”避让时机而采取转向行动,那就是盲目的转向避让,这是不被规则认可的。
三、避碰规格和潜规则的博弈
在采取船舶避让行动中,驾驶员往往更愿意采取转向避让而不是减速避让,宁愿辛苦地紧盯雷达、频频转动舵轮而不愿意转动车钟,这也可以说是船上的一种潜规则。因为船舶进行减速避让会加大机舱值班轮机员的工作负担,有的时候可能引起船舶振动的变化,影响到其他船员的休息。甚至有的驾驶员认为,如果采取了减速避让,会被同事们认为驾驶技术不好。上述这些顾虑造成了船舶好比没有制动的汽车,发生碰撞也就不足为奇了,事故造成的损失也很严重。
当“潜规则”一旦成为一种习惯甚至是一种行规时,它对船舶驾驶员的影响就会超过避碰规则的规定。毕竟发生碰撞事故的船舶还是少数,因此不少船员抱着侥幸心理。所以我们常常发现有许多船舶在能见度不良的通航密集区全速行驶。随着造船业的发展,船舶高速化、大型化趋势明显,30万t级的油船频频出现在海面,而一旦发生碰撞事故,不仅影响全船的财产、生命安全,还会造成海洋污染,给生态环境带来灾难性的危害。
无论是公司管理者还是船员,都应该认识到“潜规则”的危害性,这不光关系着船舶的安全、人员的安危,也直接关系着公司的生存。严格遵守避碰规则,在能见度不良时做到及早减速,而不是最后的盲目转向,让“潜规则”无所遁形,这样不但能够减轻驾驶员的心理压力,保障船舶航行安全,也会进一步保障公司的经济利益。
Comprehension on conduct of vessels in restricted visibility