数字控制系统等效模拟校正调试研究
2011-05-11王晓丽赵艳花
王晓丽,赵艳花,周 阳
(1. 洛阳理工学院 电气工程与自动化系,洛阳 471023;2. 同济大学 电子与信息工程学院,上海 200092)
数字控制系统等效模拟校正调试研究
王晓丽1,赵艳花1,周 阳2
(1. 洛阳理工学院 电气工程与自动化系,洛阳 471023;2. 同济大学 电子与信息工程学院,上海 200092)
0 引言
随着计算机在控制系统中的应用,越来越多的控制系统实际是一个数字控制系统。数字控制系统中的控制器的直接设计方法[1]和解析设计方法[1]均需要事先得知实际系统精确的数学模型,而实际系统总会和系统模型之间存在差别,这使得用脉冲传递函数表示的数字控制系统在调试时会出现参数之间关系耦合、参数更改与系统特性之间表现不直观的特点,因此用脉冲传递函数的表示方法多见于系统模型的分析与设计过程中,而少见于工程现场的程序实现与调试。传统频域分析法由于概念清楚和方便调试,很多时候还广泛的为科研和工程人员所使用[2-5],特别是因为PID法和频域响应法校正均有成熟的经验和步骤可以参考。等效模拟校正设计方法[1]正是根据连续系统性能指标为某个等价的连续系统设计一个模拟校正装置,然后再通过某种转化方法将模拟校正装置传递函数变换为等效的数字控制器脉冲传递函数。转化的方式有后向差分,梯形积分两种方法。增量的PID[7]概念清楚,调试步骤明确,便于计算机内实现,本文受其启发,基于等效模拟校正方法的滞后超前校正方法,设计出通用的流程,并分析了配合参数与滞后超前校正参数之间的定量关系。为数字控制系统的设计和调试提供快速方法。本方法和增量式PID算法具有同样优点,有很高的推广应用价值。
1 频域法校正及等效方法
线性控制系统一般由多个闭环组成的。如伺服控制系统是由电流环、速度环、位置环组成的三闭环结构。为了简化分析,本文以三闭环中速度环为例,其它闭环的分析方法相同。典型的伺服控制系统速度环如图1所示[8]。G(s)是控制器的传递函数,G0(s)是电机的传递函数。
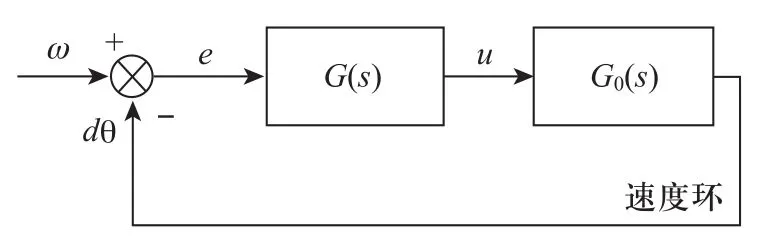
图1 单闭环控制系统
为了把控制系统校正为I型或II型系统,可用的频域响应法校正方法有多种。本文仅考虑串联校正中的滞后校正、超前校正、滞后超前校正和PID的等价形式共四种类型。为了分析的简洁,本文假定增益等于1。对于实际系统,可用传递函数转化求等效偏差 的方法使得增益等于1,如图2所示。
频域响应校正方法中典型的校正环节有超前校正、滞后校正、滞后超前校正等。其公式表述如式(1)-式(4)。
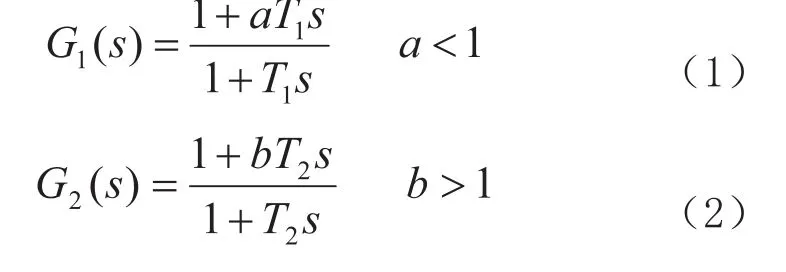
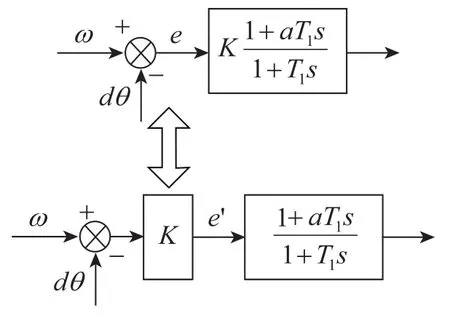
图2 假定增益为1的等效关系图

其中, a<1,b>1。

等效模拟校正设计方法中常用的转化方式有后向差分,梯形积分两种。其表达式为:

将式(5)分别代入式(1)-式(4),可得到式(7)-式(10)一组转化结果。

可以看出,当式(9)中某些参数取特定的值时,可以得到式(7)、式(8)。伺服控制系统设计时,时常使用P、PI或PD控制率,将这些控制率等效成典型校正环节后,再与式(7)相比,可以得到参数配合关系如表1所示。因此,可以认为式(9)是式(7)、式(8)、式(10)的统一形式。所以,下文以式(9)为例做出分析。

表1 典型校正环节参数配合关系表
由文献[9]对脉冲传递函数的分析,可知:

对比式(9)和式(11),可以得出:
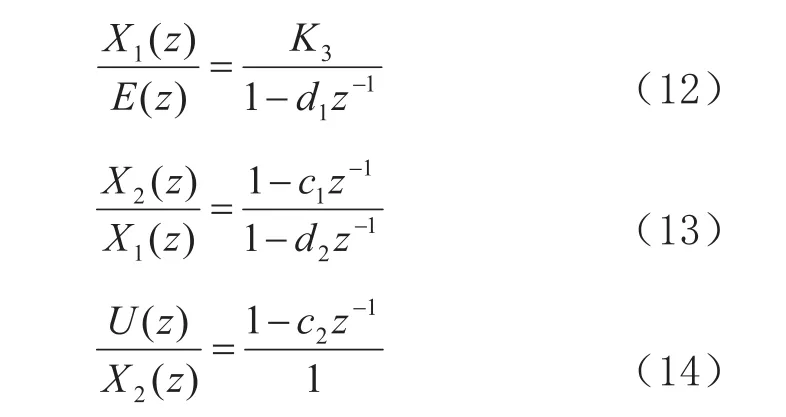
由式(12)-式(14)转化为对应的脉冲传递函数可为:

至此,频域分析法校正的四种常用形式在式(5)的条件下统一的程序流程可以得出,如图3所示。可以看出,图 3 中 x1(k),x2(k),u(k)的意义和式(15)相同。同样的分析,可以得出式(6)转化式(1)-式(4)的程序流程一致,仅是参数配合关系不同。在此限于篇幅,具体过程从略。
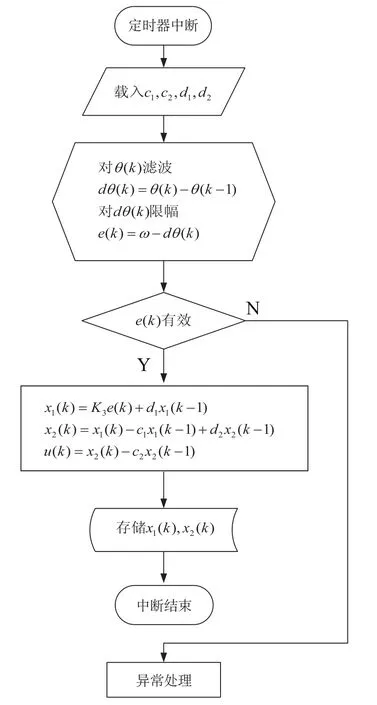
图3 滞后超前校正等效模拟方法流程图
2 调试方法分析
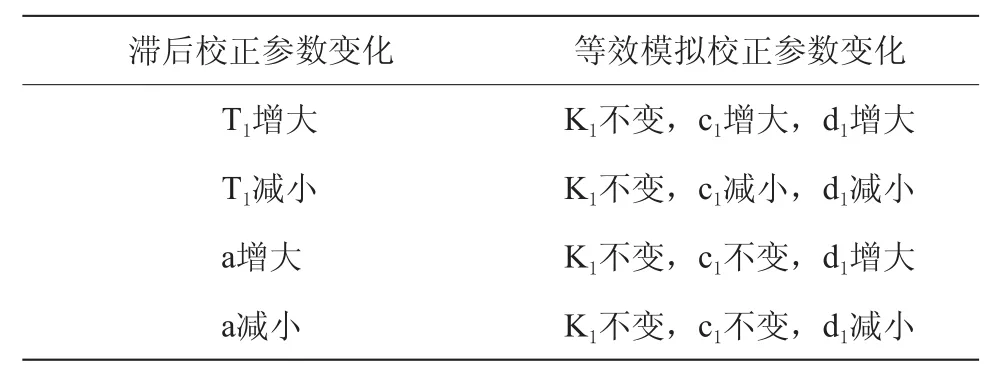
表2 参数配合趋势

图4 参数c1与参数T1,a典型值的配合关系
3 结论

图5 参数d1与参数T1,a典型值的配合关系
本文推得出了数字控制系统可用的滞后超前校正统一形式,并给出了典型环节的参数配合解析式和程序流程图,并指出参数变化的配合关系。解决了数字控制系统中脉冲传递函数描述方法在调试过程中参数修改直观性不强的问题。本方法和增量式PID具有同样的优点,为科研和工程技术人员快速设计和调试控制系统提供帮助,有重要推广应用价值。
[1]吴麟. 自动控制原理[M]. 北京: 清华大学出版社. 2004:25-131.
[2]Fulford, Adam.An embedde mechatronic system for wireless servo control[J]. Proceedings of the American Control Conference, 2002, 2: 1658-1659.
[3]王连明, 机载光电平台的稳定与跟踪伺服控制技术研究[D], 长春: 中国科学院长春光学精密机械与物理研究所,2002: 60-65.
[4]庞新良. 机载光电稳定平台数字控制关键技术研究[D].长沙: 国防科技大学, 2007: 51-61.
[5]陈占军. 基于DSP伺服系统位置环的设计[J]. 机床与液压. 2007, 35(7): 165-167.
[6]周阳, 董国华. 光电红外成像消旋系统测控技术研究[J].机电工程. 2010, 27(1): 4-8.
[7]刘金锟. 先进PID控制及其MATLAB[M]. 北京: 电子工业出版社. 2004: 35-42.
[8]Hirata, Mitsuo. Servo performance enhancement of motion system via a quantization error estimation method-Introduction to nanoscale servo control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(10): 3817-3824.
[9]张琛. 精密定位技术[M].上海:上海交通大学.1992.
[10]李友善. 自动控制原理[M]. 北京: 国防工业出版社.2007: 252-260
Equivalent analog correction debuging method of digital control system
WANG Xiao-li1, ZHAO Yan-hua1, ZHOU Yang2
针对脉冲传递函数描述方法在调试过程中参数修改直观性不强的问题,根据数字控制系统中等效模拟校正方法能够将模拟校正装置传递函数变换为等效的数字控制器脉冲传递函数的特点,推导出滞后超前校正的统一形式,指出了典型环节的参数配合解析式及相应的参数变化范围,给出用等效模拟校正方法转化后的滞后超前校正的程序流程图,并指出参数变化的配合关系。研究结果表明,该方法具有概念清楚,调试步骤明确,便于计算机实现等优点。为科研和工程技术人员快速设计和调试控制系统提供帮助。
滞后超前校正;PID校正;数字控制系统;双线性变换
王晓丽(1980-),女,河南禹州人,助教,硕士,研究方向为智能控制技术,现代测控技术与系统。
TP273
A
1009-0134(2011)4(下)-0013-04
10.3969/j.issn.1009-0134.2011.4(下).05
2011-02-28
