高精度三维GPS控制网的建立与数据处理
2011-04-18曾祥新邱蕾王泽民
曾祥新,邱蕾,王泽民
(1.南宁市勘测院,广西南宁 530021; 2.中国科学院深圳先进技术研究院,广东深圳 518055;3.武汉大学测绘学院,湖北武汉 430079)
高精度三维GPS控制网的建立与数据处理
曾祥新1∗,邱蕾2,王泽民3
(1.南宁市勘测院,广西南宁 530021; 2.中国科学院深圳先进技术研究院,广东深圳 518055;3.武汉大学测绘学院,湖北武汉 430079)
全面介绍了南宁市城市高精度三维GPS控制网的概况,然后讨论了利GAMIT/GLOBK软件处理控制网的基线处理方案和网平差方案,计算出各个测站在ITRF2005框架下的三维直角坐标,得出南宁市三维GPS控制网不论从布网,还是精度上均达到甚至优于国家B级GPS网的结论。
基线向量解算;网平差;控制网
GPS定位技术可以直接精确地测定地面点的三维坐标,该技术以其高精度、全天候、高效率等特点而被广泛应用于测绘行业的各方面。南宁市不同起算点、不同期的GPS控制网间出现缝隙给使用带来麻烦,且城区东西跨度近100 km,边缘投影存在形变问题,同时为了提高现有测绘体系的精度,建立南宁市现代测绘基准体系已迫在眉睫。
本文结合南宁市基础测绘项目,采用GAMIT软件综合精密星历、近轨天体摄动及地球自身规律性变化等各种因素,对南宁市框架网的连续观测数据进行数据处理,得到较理想的结果,建立了南宁市高精度GPS控制网。
1 控制网概况
南宁市高精度GPS控制网建立分框架网(B级网)和基本控制网(C级网)二级进行。B级网有12个点,平均站间距30 km~40 km,其中5点为南宁市连续运行卫星定位服务系统(NNCORS)基准站点,构成GPS控制网的框架。在B级框架网的基础上布设C级GPS控制网共184个点,点间距约5 km~12 km,尽可能将测区范围内已有等级控制点如一、二等三角点、国家GPS网点、原城市控制网等级点纳入。采用GPS技术进行了观测,共采用12台双频GPS接收机,B级网共观测了26 d,采样间隔1 s,C级网观测26个时段,每个时段8 h,采样间隔15 s。
2 GPS控制网基线向量解算
基线处理采用美国麻省理工学院和Scripps研究所共同研制的GAMIT 10.31软件。基线处理分两步进行,首先是框架网(B级网)的基线处理,其次是C级网的基线处理。框架网(B级网)与C级网基线处理的方法基本相同,不同之处在于:框架网联测IGS跟踪站,而对于C级GPS网,则以精确的框架点坐标为基准,先从有框架点的同步观测网开始解算,然后用推算得到的未知测站的坐标作为基准来解算相邻的同步观测网,乃至整个GPS控制网。
2.1 基线解算的主要模型和参数
采用GAMIT软件对所有基线进行分天处理,首先对原始数据进行周跳探测和修复,删除粗差后生成干净的观测数据文件(X文件),然后根据IGS精密星历进行轨道积分、生成观测方程和解算基线,最后得出单天解。
在单天基线解算时考虑的主要因素包括:协议惯性参考系采用J2000;卫星钟差的模型改正用IGS精密星历中的钟差参数;接收机钟差的模型改正(用根据伪距观测值计算出的钟差);接收机钟差的模型改正用根据伪距观测值计算的钟差;电离层折射影响用LC观测值消除;对流层折射根据标准大气模型用Saastamoinen模型改正,对流层天顶距延迟每2 h设置一个;卫星和接收机天线相位中心进行改正,天线L1、L2相位中心偏差采用GAMIT软件的默认值;测站位置的潮汐改正采用全球潮汐格网进行内插;卫星轨道改进使用GAMIT标准力模型,求解卫星轨道初值,光压模型采用BERNE模型解算;卫星截止高度角为15°,历元间隔为1 s,C级网历元间隔为15 s,卫星轨道误差不考虑,即固定IGS轨道定位。
另外为了引入基准条件,从IGS网站上下载了约5个IGS跟踪站的观测数据,与所在区域的观测站一并处理。其中框架网联测的IGS站和坐标基准如表1所示。这些IGS跟踪站的位置精度并不一致,对其中坐标精度较高的观测站SHAO,WUHN,KUNM采用强约束(X,Y,Z方向的约束值分别为1 cm,1 cm,1 cm),其他IGS测站采用松约束,其目的在于利用多余观测站进行检查整网的数据解算结果是否正确。

NNCORS框架网基线解算方案 表1
2.2 基线处理的精度统计与结果分析
基线的精度是衡量基线质量的标准,因而在同步图形基线处理完毕后,需要对控制网中的基线及基线中各分量的精度、同步环、异步环闭合差以及重复基线进行统计分析。
(1)同步环检核
对于GAMIT软件基线解的同步环检核,可以把基线解的nrms值作为同步环质量好坏的一个指标,一般要求nrms值小于0.5,不能大于1.0,若nrms值小于0.3表明基线解的质量很好。26个单天解的nrms在图1中绘出。从图中可以看出,南宁市GPS框架网中的NNCORS参考站点共解算了26个同步时段,基线解的nrms值全部小于0.3,结果表明GPS网的外业观测整体质量很高,基线解算的精度也很好。

图1 NNCORS参考站点共解算了26个同步时段单天解的nrms序列
(2)异步环闭合差和重复基线
异步环闭合差反映了整个GPS网的外业观测质量和基线解算质量的可靠性,相对于同步环闭合差,异步环闭合差对GPS成果质量更为重要。异步环闭合差应满足:
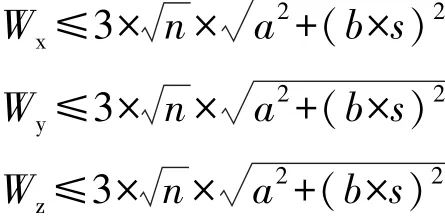
按照B级网的相关标准(a=8 mm,b=1 ppm),对框架网和C级网进行检核。在检核的异步环中,所有的异步环闭合差都小于《全球定位系统(GPS)测量规范》的要求。重复基线差最大的基线,其相对精度为0.05 ppm,满足本项目技术设计和规范要求。
3 GPS网平差
ITRF框架下网平差的目的是通过与国际IGS跟踪站的联合处理,将ITRF框架基准分别传递至框架网和C级GPS网,建立三维地心基准,同时将高精度三维城市控制网与国际IGS站联结起来。其过程分两步进行,第一步进行框架网平差,由全球IGS站的ITRF2005坐标为基准,确定框架点的坐标;第二步进行C级网平差,以框架点的坐标为基准,确定C级GPS点的坐标,网平差软件采用科傻GPS数据处理系统5.1。
3.1 框架网平差
在框架网平差中固定IGS基准站,平差后基线的相对精度水平方向达到10-9,垂直方向优于10-8。点位精度在表2中列出。平差时采用科傻GPS数据处理系统5.1,处理26天的NNCORS基准站5点与国际IGS站点之间基线,并把ITRF2005框架瞬时历元坐标从国际IGS站传递到NNCORS基准站,从表2中可见5个NNCORS基准站的点位精度y方向为1.6 mm,x方向和z方向精度均高于1 mm。
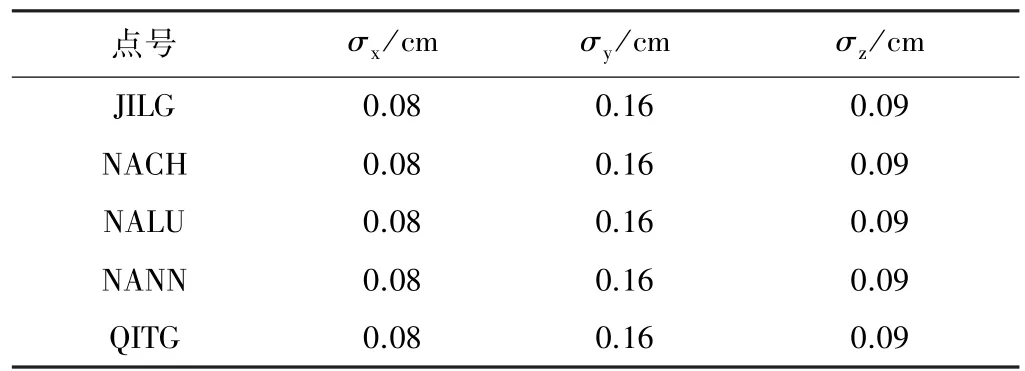
点位精度 表2
3.2 C级GPS网平差
C级GPS网平差在ITRF2005框架下的平差,以NNCORS 5个参考站的高精度ITRF 2005坐标为起算点进行全网平差。为了保证整个GPS网的精度均匀以及平差严密,特意把另外观测了3昼夜的7个框架点以及所有C级GPS网点进行一并平差。表3、表4分别为C级GPS网三维无约束平差基线向量改正数及改正数区间分布统计,图2为基线向量改正数在各个方向的分布图。从表3表4和图2可知,网平差得到的基线观测量坐标分量改正数较小,C级GPS网观测质量良好,平差基线内符合精度高。
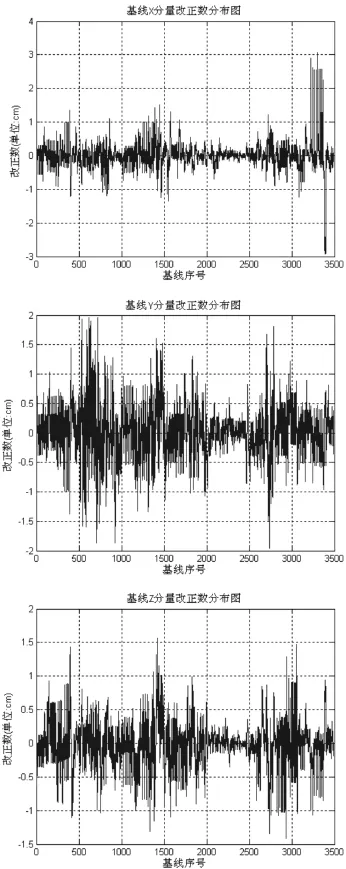
图2 基线分量改正数分布图
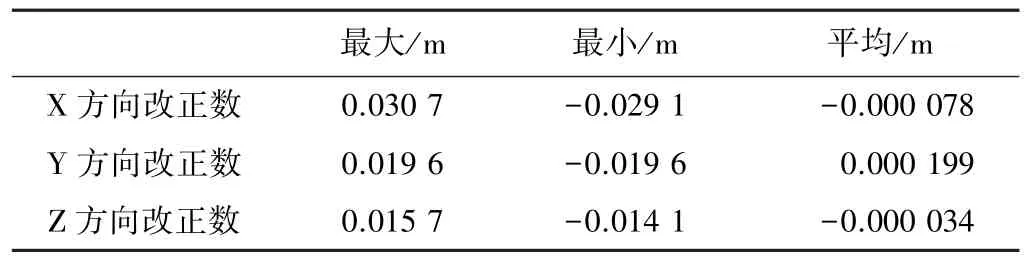
C级网平差基线向量改正数统计 表3
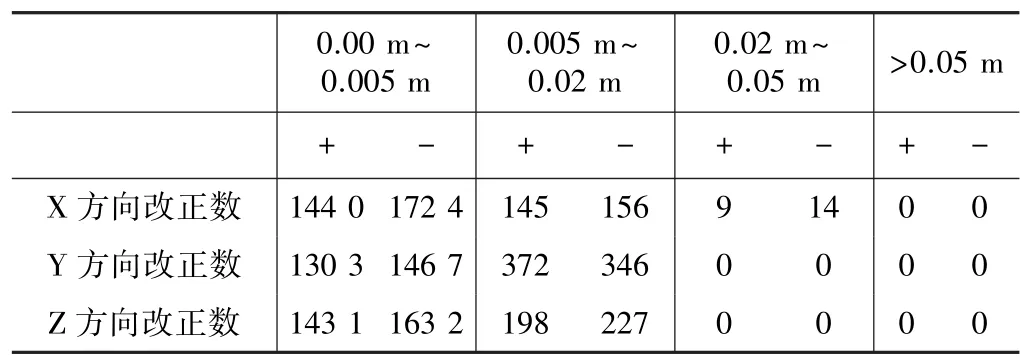
改正数区间分布统计 表4
南宁市C级GPS控制网三维约束平差以5个NNCORS基准站,即QITG、NALU、NANN、NACH、JILG为起算基准。C级网整网进行平差后,C级网的平均边长为24.468 km,平均相对精度为0.035 ppm,最弱边相对精度为1.10 ppm,边长为0.940 9 km。坐标分量在水平方向上的平均精度为0.000 5 m,大地高方向为0.003 m。最弱点水平精度为0.007 m,大地高精度为0.016 m。表5、表6、表7为C级GPS网点位精度统计表。

C级网三维约束平差边长相对中误差区间分布统计 表5
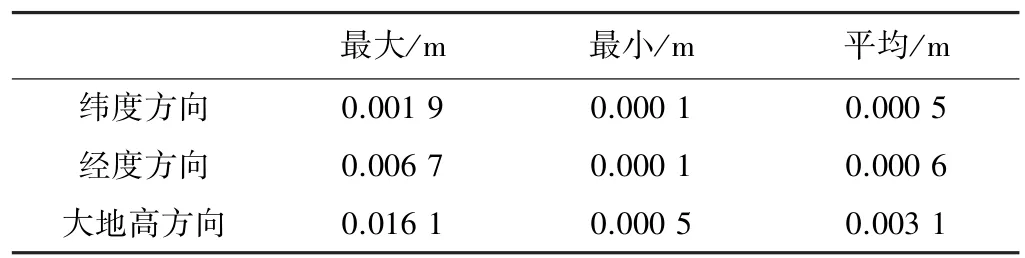
C级网三维约束平差点位精度中误差统计 表6
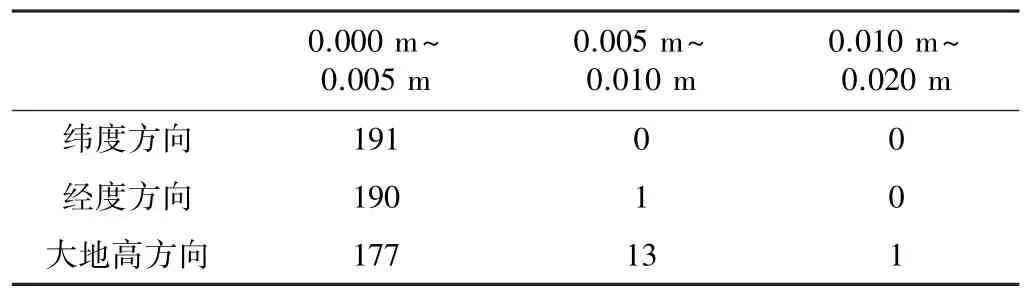
C级网三维约束平差点位精度中误差区间分布统计 表7
4 结论与建议
根据上述比较分析,可得出如下结论:南宁市高精度GPS网点布设比较合理,图形结构好,因此提高了该地区的三维控制网精度;解算的基线向量用同步环和异步环进行检测,质量高。从平差结果来看,南宁市C级GPS控制网ITRF框架下三维约束平差无论是在点位精度,还是基线改正数以及基线相对中误差等方面均达到或超过了规范和技术设计书有关C级GPS网的相关精度要求,为区域似大地水准面精化提供高精度三维大地坐标数据。
[1] 宁津生,刘经南,陈俊勇等.现代大地测量理论与技术[M].武汉:武汉大学出版社,2006
[2] 董鸿闻,李国智,陈士银.地理空间定位基准及其应用[M].武汉:测绘出版社,2005
[3] 佘佐明.建立贵阳市高精度测绘基准的研究与思考[J].城市勘测,2008,6:18~21
[4] 于建城,郭春喜.天津市二等三角网改造数据处理[J].城市勘测,2007,3:28~31
[5] 施宝湘.宁波市第二代GPS控制网的实践与探讨[J].城市勘测,2005,1:21~23
[6] 肖建华.中国城市勘测工作50年论文集[M].武汉:测绘出版社,2004
[7] 洪立波,金善焜等.城市测量手册[M].北京:中国建筑工业出版社,1999
Establishment and Data Processing of Three-dimensional GPS Control Network
Zeng XiangXin1,Qiu Lei2,Wang ZeMin3
(1.Nanning Exploration&Survey Institute,Nanning 530021;2.Shenzhen Institutes of Advanced Technology,Chinese Academy of Sciences,Shenzhen,518055;3.School of Geodesy and Geomatics,Wuhan 430079)
The high-precision three-dimensional GPS network in Nanning is firstly introduced and then the baseline processing method and network adjustment program using the GAMIT/GLOBK software are discussed in the paper.The three-dimensional Cartesian coordinates under ITRF2005 are obtained by the software.And the conclusion is that threedimensional GPS control network in Nanning,whether from the distribution of the network,or accuracy are achieved even better than the national B-level GPS Network conclusions.
Baseline vector;Network adjustment;Control Network
1672-8262(2011)02-61-04
P228
A
2010—06—09
曾祥新(1966—),男,高级工程师,主要从事工程测量工作。
南宁市科学技术局(南宁市高精度三维GPS控制网的建立及似大地水准面精化,20082019A)