基于手机探测定位救灾系统的设计与研究
2011-03-28江汇金飞姚承宗何志聪邓兴国
江汇,金飞,姚承宗,何志聪,邓兴国
(河海大学江苏南京210098)
由于灾难的频繁发生,对受灾人员开展及时高效的救援工作就显得尤为重要。开展有效的救援工作,就必须清楚被困人员的具体位置及营救路线,这就是救援工作中的定位与搜救策略。若想对被困人员定位,首先应进行生命探测,即探测灾区是否存在被困人员。目前国内外的生命探测技术主要分为直接探测与间接探测技术。直接探测指的是探测由人的生命迹象直接反应出得一些物理量,从而判断出是否有被困人员,如辐射的红外线、发出的声音频率等。间接探测指的是探测由人携带的一些设备的信息,从而间接的判断出是否有被困人员,如探测区域内是否有手机存在。
目前国内外进行生命探测时主要采用直接探测法,其适用范围单一,成本很高。由于现代科技下手机普及率越来越高,故通过手机进行间接探测的生命探测法显得越来越重要。手机探测定位方法的适用范围广,实现成本低,但其难点在于信号源的选取与定位精度的控制。在实际搜救中,仅仅定位出被困人员是不够的,还需确定搜救的路径。笔者将采用Floyd算法计算搜救的最短路,从而迅速的进行营救。
1 救灾系统的主要设计思路
本设计的救灾系统的主旨是对灾难现场进行生命探测,继而进行搜救,从而尽量挽救受灾人员的生命安全。
本系统分为生命探测与搜救两大模块。首先进行生命探测,可分为直接与间接探测,其中以手机定位的间接探测为主要探测手段,辅以直接探测。最后将探测报告传递给搜救模块。
搜救模块接收探测报告,进行分析处理,利用定位算法得出位置信息。同时结合特定的灾难情况,通过传感器获取救灾路径信息,利用Floyd算法得出搜救的最佳路径。考虑到最佳路径的适用情况,具体设计方案研究的重点是火灾救援情况。
2 具体设计方案
2.1 生命探测模块的设计
2.1.1 手机探测法
通过探测手机信号从而判断是否有人员存在[1],这是一种间接的生命探测方法。同时通过传感器记录相应信号信息,便可通过一定算法定位手机。
1)信号源的选取此种探测法的难点在于信号源的选取。若通过基站来定位移动台,这种方法虽然简单有效,但存在相当多的限制,例如存在基站未能覆盖的区域,以及建筑物对基站信号具有屏蔽作用等。故利用基站信息定位手机在灾难救援这种特殊的情况下不可行。本文的手机探测法为探测以目标手机作为信号源发出的信号。
2)触发机制虽然手机本身会不定时的发出信号,但在灾难情况下,需要迅速的探测信号,故必须有触发机制触发手机发出信号。文中设计了两种触发机制。
机制一,手机从盲区进入覆盖区,将搜寻网络,发出信号,利用这一点便可探测其信号。
机制二,建立室内小型基站,即伪基站,主动发出信令与手机通信,从而探测手机发出的信号。
由于机制二涉及AT指令与信令分析等,其实现成本与难度都很高。故重点考虑机制一。实现机制一的方法有很多,只需制造手机盲区环境即可,例如模仿手机屏蔽器原理便可在一定范围内制造盲区,然后再撤去盲区即可利用信号接收机进行即时的手机信号探测。
3)具体流程手机探测流程图如图1所示。
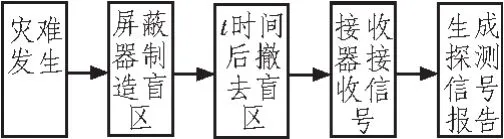
图1 手机探测流程图Fig.1 Flow chart of phone detecting
4)模块评价由于火灾具有可以明显检测的特征,故可通过烟雾或温度传感器判断火灾的发生与否。考虑到屏蔽形成盲区后可能会对区内人员手机通信造成影响,但其持续时间可以控制的很短,故此影响可忽略。
2.1.2 直接探测法
由于间接探测也有其局限性,故需辅以直接探测法进行生命探测。直接探测法是直接探测人体静止或运动时表现出的一些生命迹象,如辐射的红外线、运动速度等,从而判断是否有生命存在。
本设计的直接探测法采用探测人体红外线与移动相结合的方案。具体使用热释电红外线传感器与微波传感器。利用热释电红外线传感器进行生命探测是目前广泛使用的方法,但由于火场环境下会干扰此传感器进行探测,故采用微波传感器联合工作。微波传感器可以探测处物体的移动,当两种传感器结合起来时便可排除火的干扰。故采用此种方案可较为准确的探测出生命。
2.1.3 间接与直接的配合
虽然直接探测法探测的是直接的生命迹象[2],应比间接探测手机存在与否更为准确,但实际上直接探测法易受传感器精度、环境等因素影响,在实际应用中反而不如间接探测准确。综合考虑两种探测法的优缺点,可通过逻辑关系运算进行两种方法的平衡。若两者关系为逻辑与,则表明探测要求强烈。若为逻辑或,则表明探测要求较为保险,容许有一种方式探测不成功,提高了安全储备。在实际应用中,可降低直接探测的权重,同时保证一定的安全储备。最后,通过逻辑运算生成探测报告,并传输给搜救模块。
2.2 搜救模块的设计
2.2.1 搜救模块流程介绍
搜救模块主要由定位算法与Floyd算法组成,其工作流程如图2所示。
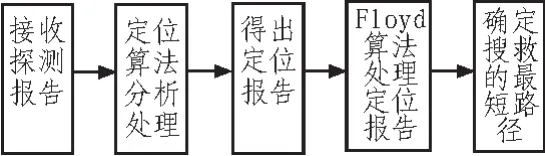
图2 搜救模块流程图Fig.2 Flow chart of rescue module
2.2.2 定位算法
利用三角形质心定位算法,分析处理探测报告,得出手机位置信息。
1)三角质心法原理[3-4]某区域内存在3个手机信号接收机,与目标手机MS形成3个物理距离,以这3个距离为半径作圆,三个圆的公共交点即应为MS的位置。但实际中需考虑环境对信号的衰减作用,即存在信号的损耗。故接收机收到的信号强度偏小,即相应的距离增大,故以这样的距离做出的3个圆没有公共交点,如图3所示。
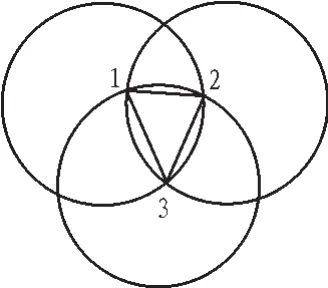
图3 3个圆无公共交点Fig.3 No common point with three circles
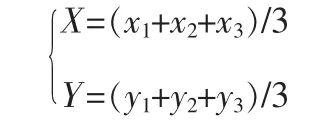
由于信号衰减是始终存在的,尤其是室内环境更会阻碍信号传播,故上述情况更为普遍。通过解3个圆的联立方程组,易确定公共区3点的坐标(x1,y1),(x2,y2),(x3,y3)。故MS的坐标为:
2)实际应用分析三角质心定位算法直观简便,且定位精度很高,但当环境噪声很大时可能会导致3个圆都不相交的情况出现,如图4所示,故无法定位MS。
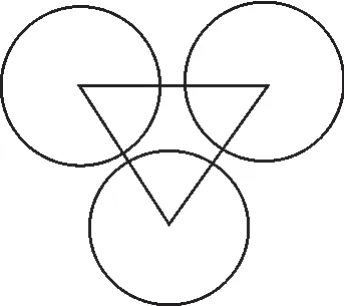
图4 3个圆不相交Fig.4 No intersect with three circles
解决这种情况的方法有很多,但在算法上一般都很复杂,效果也不理想。在其适用范围内,文中提出可进行多次取样来弥补无法定位MS的情况。
3)适用范围三角质心定位算法适用于较大范围内的探测与定位,对于室内与室外环境都适用。由于文中重点考虑火灾情况下的设计方案,故针对的环境较多为室内探测定位。当室内空间较小时,判断出有无手机信号即可进行搜救,无需进行定位。若室内空间较大时,经过多次取样利用三角质心定位算法便可定位MS。
由于进行室内定位时无需精确定位,故三角质心定位算法的误差在容许范围之内。
2.2.3 Floyd算法
搜救模块利用Floyd算法[5]得出起点到目标点的最短路。
1)Floyd算法原理
最短路径是指:对于给定的有向网G=(V,E),要对G中任意一对顶点有序对V、W(V≠W),找出V到W的最短距离和W到V的最短距离。
弗洛伊德算法使用图的邻接矩阵D[n+1][n+1]来存储带权有向图。算法的基本思想是:设置一个n×n的矩阵A(k),其中除对角线的元素都等于0外,其它元素A(k)[i][j]表示顶点i到顶点j的路径长度,K表示运算步骤。开始时,以任意两个顶点之间的有向边的权值作为路径长度,没有有向边时,路径长度为∞,当K=0时,A(0)[i][j]=D[i][j],以后逐步尝试在原路径中加入其它顶点作为中间顶点,如果增加中间顶点后,得到的路径比原来的路径长度减少了,则以此新路径代替原路径,修改矩阵元素。最终得到各点之间的最短路。
2)算法应用
考虑火灾救援情形,当生成定位报告后,由传感器确定各节点通路情况,即主要通道灾情信息,然后通过Floyd算法得出搜救的最短路径。
由于重特大火灾一般需要多个消防力量共同协力进行火灾救援,此时的最佳路径问题属于多源最佳路径问题。所以求出任意两个节点之间的最短路径长度以及最短路径就具有广泛的实用性。
3 推广与改进
由于Floyd算法计算最短路在火场救灾时最为有效,故本文设计的救灾系统重点考虑的是室内火灾的救援情况。若希望适用于其他灾情时,可相应的修改获取节点通路信息的方式,即换成适当的传感器进行探测通路信息。
对于火灾救援系统[6],可预先对目标建筑物进行三维建模,对传感器及探测器等进行标识,形成电子三维救灾系统。当某区域发生火灾时,在模型中显示受灾区,被困人员位置,搜救最短路径等信息,这样就能开展可视化下的迅速救援工作。
4 结论
文中设计与研究的救灾系统以手机信号探测作为生命探测的主要方式,与传统的直接探测相比,具有探测准确,精度满足实际应用要求,成本低等优势,具有广泛的理论研究与应用价值。
其设计的搜救模块将定位与最短路搜救结合在一起,能够在探测到定位信息后计算出搜救的最短路径,使搜救工作更迅速更高效的开展,从而尽量保障被困人员生命安全。
[1] 陈川,郭勇.利用手机信号进行生命探测的研究与系统设计[J].仪器仪表用户,2008,15(3):12-13.CHEN Chuan,GUO Yong.A novel life detecting system research and design based on cell phone detecting[J].Electronic Instrumentation Customer,2008,15(3):12-13.
[2] Patwari N,Ash J.Locating the nodes:cooperative localization in wireless sensor networks[J].IEEE Signal Processing Magazine,2005,22(4):54-69.
[3] 林玮,陈传峰.基于RSSI的无线传感器网络三角形质心定位算法[J].现代电子技术,2009(2):180-182.LIN Wei,CHEN Chuan-feng.RSSI-based triangle and centroid location in wireless sensor network[J].Modern Electronics Technique,2009(2):180-182.
[4] 叶蔚.室内无线定位的研究[D].广州:华南理工大学,2010.
[5] 石为人,王楷.基于Floyd算法的移动机器人最短路径规划研究[J].仪器仪表学报,2009,30(12):2088-2092.SHI Wei-ren,WANG Kai.Floyd algorithm for the shortest path planning of mobile robot[J].Chinese Journal of Scientific Instrument,2009,30(12):2088-2092.
[6] 聂伟,王祁.用于火灾报警的多传感器信息融合系统[J].传感技术学报,1998(2):42-48.NIE Wei,WANG Qi.The multisensor fusion system for conflagration alarm[J].Journal of Transcluction Technology,1998(2):42-48.