“企业”号航空母舰耐波性数值计算研究
2011-03-06姜宗玉吴宗铎
宗 智 姜宗玉 吴宗铎
大连理工大学船舶工程学院,辽宁大连 116024
“企业”号航空母舰耐波性数值计算研究
宗 智 姜宗玉 吴宗铎
大连理工大学船舶工程学院,辽宁大连 116024
法国船级社研发的水动力商业软件HydroSTAR适用于多种浮式结构物在波浪上运动的预报。文章以美国“企业”号航母为例,讨论了HydroSTAR对航空母舰耐波性计算是否依然适用,并将HydroSTAR的计算结果与切片法的计算结果进行了对比。同时,将计算出的船体运动响应幅值的有义值跟与已知的统计资料进行了对比。通过对比分析发现,利用HydroSTAR计算得到的航母运动响应较为合理地反映了航母的实际耐波性能,可以为航母的耐波性计算预报提供有价值的参考。
耐波性;HydroSTAR;切片法;P-M海浪谱;航空母舰
1 引言
航空母舰是一种以舰载机为主要作战武器的大型水面舰船,其任务决定了它要经常在大洋中航行,因此,遭遇的海况要比普通舰船恶劣。同时,作为移动的海上飞行基地,其耐波性能不仅要满足自身的安全需要,还得满足舰载机在飞行甲板上安全、顺利起降的需要,这就要求航母能够在恶劣的海况下保持较小的横摇、纵摇和垂荡幅值,具有良好的耐波性。航空母舰对耐波性的要求要比普通舰艇高得多,因此,对航母的耐波性研究也非常重要。
目前,在船舶水动力学领域,势流理论已成为计算船舶在波浪中的运动和载荷响应的有效方法。根据求解流场所用数学模型的维数不同,可分为二维和三维两种理论。
其中,二维切片理论原理易懂,计算快捷,对船型的适用范围较好,并且,因其对船舶耐波性和载荷响应的预报精度能够满足工程需要而在船舶设计中被普遍采用。为了体现船舶水动力计算的航速效应,一种高速细长体理论被用于船舶耐波性理论的预报。高速细长体理论针对高速船型船长吃水比较大的特点,采用二维势流理论求解流场,同时保留了三维有航速的自由面条件,特别适合高航速下的船舶运动和波浪载荷预报。在这方面,马山、宋竞争和段文洋[1]以NPL单体船船模Mode 15b为例,对二维半理论与切片理论在不同航速下的水动力、运动响应和垂向波浪载荷的数值结果进行了比较。段文洋、马山[2]采用二维时域自由面格林函数将定解问题转化为船体切片上的积分方程,进而求解有航速下的船舶水动力问题,对ITTC建议的标准Wigley船型作了理论预报,并与DELFT大学的实验结果和采用STF切片法的理论预报结果进行了比较,得到了相当接近的结果。
三维理论是一种能更精确地预报船舶在波浪上运动的理论,伴随着高速计算机的发展,这一理论取得了长足的进步[3-4]。 吴梵、陈志坚、刘巨斌等[5]采用直接边界元法,利用三维移动脉动源格林函数计算了小水线面双体船在波浪中的水动力。针对小水线面双体船在零航速、横浪时所受到的波浪载荷最大的特点,分析计算了在横浪和斜浪工况下的水动力大小和分布特性。肖龙飞、杨建民、李欣等[6]利用三维线性势流理论和源汇分布法研究了一艘FPSO在浅水中的辐射问题,对不同水深下FPSO的水动力系数进行了数值计算。结果表明,浅水深时,3个垂向运动(垂荡、横摇和纵摇)附加质量与六自由度运动的阻尼系数均有明显增加,因此,FPSO垂向运动幅度也必将较大地趋于缓和,从而不易导致浅水FPSO碰底现象的发生。王建方、李辉辉、徐正强[7]运用基于三维频域线性理论的近场方法研究了波浪中两浮体之间二阶漂移力(矩)的相互干扰,建立了两船相隔一定间距在波浪中运动的二阶漂移力 (矩)的数学模型。通过对固结的两船在横浪中的二阶横向漂移力及首摇漂移力矩的计算,并将得出的结论与试验结果进行比较,发现两者吻合度较好。陈崧、赵留平、侯磊等[8]提出了一种计算无航速具有自由液面的三维格林脉动源函数的方法。采用零阶Bessel函数的拉普拉斯变换,将无航速具有自由液面的三维格林脉动源函数变形为易于截断处理的形式,通过采用样条插值技术和自适应方法,解决了高频振荡函数数值积分的速度和精度问题。姜宗玉、宗智、陈小波等[9]运用基于三维频域边界积分理论的HydroSTAR水动力计算软件,对三体船的附体位置对其横摇性能的影响进行了参数研究。计算结果表明,三体船的横摇性能主要受其附体的横向位置影响,附体纵向位置的影响则很微弱。
鉴于公开发表的有关航母耐波性方面的研究和耐波性资料非常少,这给研究带来了不少的困难。由于我们对航母在波浪上的运动特性和预报方法的实用性还了解不足,因此,本文将以世界上第一艘核动力航母“企业”号(CVN-65)[10]为研究对象,通过使用二维和三维方法,对航母在不同速度和浪向下的运动进行计算,研究航母在不同海况下的运动有义响应,并与公开发表的、有限的航母资料进行对比。
2 控制方程、边界条件及其数值求解
2.1 控制方程和边界条件
本文的计算引用理想流体假设,假定流体没有粘性并且是均匀不可压缩、无旋有势的,从而可以引入一个标量速度势 φ(x,y,z;t)来描述流体的空间速度ν:

由连续性方程可知,速度势φ在流体域内满足拉普拉斯方程:

式中,x,y,z分别代表笛卡尔坐标系的三个方向。
在三维计算中,速度势要满足如下边界条件:

式中,φ (x,y,z) = φ (x,y,z;t)e-iωt;ω 为波浪圆频率;U0为航速;S0为船体湿表面;n为船体湿表面法向,以指向流体域内为正。
2.2 数值方法
只有在很少的情况下才能得到拉普拉斯方程的解析解,因为在一般情况下,由于计算域边界的不规则,要想获得解析解极其困难,因此通常采用数值的方法求解,其中最常用的就是本文采用的边界元法(Boundary Element Mehtod)。边界元法只需要在物面上剖分网格,这样不仅可以降低求解问题的维数,而且计算的代价较低,精度却较高,因而被学者们广泛采用。
根据格林第三定理,如果有函数G在流体域内满足条件:

式中,p(x,y,z)为域内任一场点;q(x,y,z)为域内除场点以外的任一源点;δ为Delta函数,则对流场的速度势有以下积分:

函数G称为格林函数。最简单的格林函数为1/r(p,q),称为 Rankine 源格林函数。 通常使用的格林函数的形式都可以表示成Rankine源格林函数加上一个在计算域内调和的函数G*。即

通过选择合适的G*,可以使G满足各种边界条件,如自由水面边界条件、海底边界条件和无限远辐射边界条件,这样,积分可以只在物体表面计算。计算流场中,速度势的式(5)中同时使用了格林函数G及其导数∂G/∂n,即在边界上同时布置了源汇和偶极。通过在流域外虚拟一个流场的方法,可以使用分布源汇或偶极来计算流场中的速度势。以分布源汇为例,可得公式如下:

式中,σ为分布源强。对式(2)的边界沿法向求导可得:

根据各表面上的边界条件,在边界上给定速度势或其导数,就可根据方程(7)或(8)计算出源强σ。
3 船舶运动频率响应函数和响应谱计算
3.1 频率响应函数
计算中用到的频率响应函数的定义为:

式中,za代表垂荡幅值,m;φa代表纵摇幅值,(°);θa代表横摇幅值,(°); ζa代表波幅,m; ω 代表波浪圆频率,rad/s。
3.2 运动响应谱
船舶受波浪作用产生运动的过程是一个常系数线性系统,可以用一个线性方程描述:

式中,X(t)代表波浪扰动 /输入函数;H(ω)代表船舶的频率响应函数;Y(t)代表船舶运动/输出函数。
如果将波浪振荡用复数形式表示为

式中,ζa代表波幅,m;ω 代表波浪频率,rad/s。 则把公式(11)代入公式(10)可得:

因为线性系统具有叠加性,所以系统收到不同搅动产生的总响应可以用系统受到每个搅动产生的响应值之和来表示。这样,船体摇荡的随机函数可表示为:

通过船舶运动响应谱密度可以求得各运动响应幅值的有义值:

4 计算结果
4.1 计算模型
本文的计算在船体湿表面划分网格,计算模型与实船缩尺比为1∶1。“企业”号航母的主尺度如表1所示。坐标原点在船中位置,ox、oy轴在未被扰动的水面上,oz轴铅直向上,ox轴与船首方向一致,详见图1。浪向角β定义为:从船尾方向传来的波浪浪向角为0°;从船首方向传来的波浪浪向角为180°。根据航速v和浪向角β的不同,作者选取了9种不同的工况来计算“企业”号航母的耐波性——三个典型航速:v=0 kn,v=20 kn(巡航速度),v=33 kn(最高航速,舰载机弹射起飞和降落甲板时的航速),每个航速选取3个浪向角:β=90°, β= 150°, β=180°。

表1 “企业”号航空母舰的主尺度Tab.1 Principle dimensions of USS Enterprise

4.2 三维计算结果和切片法计算结果比较
本文应用BV的水动力计算软件HydroSTAR计算了“企业”号航母的垂荡、纵摇和横摇频率响应函数,并且和基于切片法编写的Fortran程序计算的结果(β=180°时,三个航速下垂荡和纵摇的频率响应函数)进行了比较,如图2所示。图中,3D代表用HydroSTAR计算的结果,2D代表用切片法计算的结果。通过比较可看出:
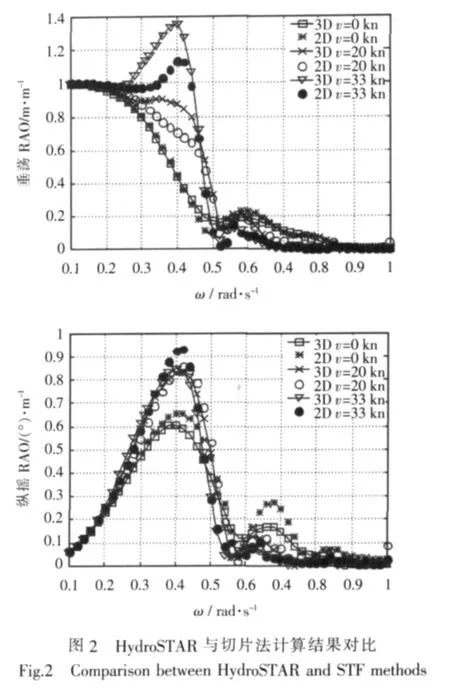
1)在航速v=0 kn状态下,用三维方法计算的垂荡频率响应曲线与用二维方法计算的曲线几乎重合,在航速v=20 kn和33 kn状态下,用三维计算的结果比二维的稍大。
2)在各航速状态下,用三维方法计算的纵摇频率响应幅值均比用二维方法计算的幅值稍小。
3)从总体上看,三维结果与二维结果的曲线趋势相同,峰值所在频率相近,幅值相差不大,在可接受范围内,吻合良好。
4.3 参数研究
9个工况下的频率响应函数计算结果如图3~5所示。因β=180°时计算的横摇频率响应函数全为零,故未给出图形。通过比较可以看出:
1)在浪向角β=90°时,航速对垂荡、横摇运动的影响微弱,不同航速下的频率响应曲线非常接近,但其对纵摇的影响却很明显,v=0 kn状态下的幅值大于v=20 kn和v=33 kn状态下的运动幅值,并且v=33 kn的频率响应曲线出现了双峰。
2) 在浪向角 β=150°和 β=180°时, 航速越高,垂荡运动幅值越大;航速v=20 kn和33 kn状态下的纵摇运动响应相近且幅值大于v=0 kn状态下的响应幅值;而横摇运动幅值则随着航速的提高而减小。
3)在浪向角β=90°时,横摇频率响应函数曲线的峰值在ω=0.31 rad/s附近,从而可以计算出“企业”号航母的固有横摇周期约为T=2π/ω=20.3 s,有效地避开了5~6级海况常见的11 s海浪周期,计算结果符合参考文献[11]提供的数据(T > 20 s)。


4.4 运动响应幅值有义值及其与已知资料的比较
本文选取的海浪谱为皮尔逊-莫斯科维奇(Pierson-Moskowitz)海浪谱:

式中,ω代表波浪圆频率,rad/s;g代表重力加速度,m/s2;Hs代表有义波高,m。
文中计算的4、6、7级海况所对应的有义波高分别为 2.2 m、5 m 和 8.9 m。 “企业”号航母在不同工况下的运动幅值的有义值如表2所示。同时,还将本文的计算结果(不同工况下的最大值)与上世纪90年代提出的航母甲板运动标准[11]规定的作业许可值——在4级海况(有义波高1.2~2.5 m)下都必须满足的数值——进行了对比(表3),对比结果显示:“企业”号航母在4级海况下的纵摇、横摇幅值都远小于标准规定的作业许可值,横摇周期大于20 s,其耐波性能很好地满足了标准的要求。

表2 各级海况下的运动响应有义值Tab.2 Significant value of wave-induced motions under various sea states

表3 4级海况计算结果和航空母舰甲板运动标准(90年代)比较Tab.3 Comparison between calculation and standard of aircraft carrier’s motion under sea state 4
5 结论
本文运用基于三维边界积分理论的水动力计算软件HydroSTAR和自编的切片法程序计算了“企业”号航母在不同工况下的频率响应函数,然后,又引入皮尔逊-莫斯科维奇(Pierson-Moskowitz)海浪谱计算了船体在不规则波中运动响应的有义值。通过对比用HydroSTAR和切片法程序计算的结果,验证了结果的可靠性,且计算出的横摇固有周期符合参考文献[11]提供的数据,同时,计算结果也满足上世纪90年代提出的航母甲板运动标准规定的作业许可值,进一步验证了结果的可靠性。综上所述,可以认为本文的计算方法能够有效地预报航空母舰在波浪上的运动特性。
[1]马山,宋竞争,段文洋.二维半理论和切片法的数值比较研究[J].船舶力学,2004,8(1):35-43.
[2]段文洋,马山.船舶航行时水动力系数求解二维半理论的稳定算法[J].船舶力学,2004,8(4):27-34.
[3]CHEN X B.Hydrodynamics in offshore and naval applications-Part I[C]//6th International Conference on Hydrodynamics (ICHD 2004).Perth, 2004.
[4]NEWMAN J N.Progress in wave load computations on offshore structures[C]//Vancouver: Oral presentation at OMAE’2004, 2004.
[5]吴梵,陈志坚,刘巨斌,等.小水线面双体船在波浪中的水动力计算[J].船舶工程,2004,26(1):17-21.
[6]肖龙飞,杨建民,李欣,等.浅水深对160kDWT FPSO水动力系数的影响 [J].水动力学研究与进展A辑,2004,19(3):257-263.
[7]王建方,李辉辉,徐正强.两浮体在波浪中二阶漂移力的三维方法研究[J].船舶,2008,19(2):18-22.
[8]陈崧,赵留平,侯磊,等.无航速具有自由液面的三维Green脉动源函数的数值积分方法 [J].中国舰船研究,2006,1(2):50-52.
[9]姜宗玉,宗智,陈小波,等.三体船横摇运动性能三维数值研究 [J].水动力学研究与进展:A 辑,2009,24(4):527-534.
[10]Bernard Ireland.Aircraft Carriers of the World [M].UK:Southwater Publishing, 2008.
[11]孙诗南.现代航空母舰[M].上海:上海科学普及出版社,2000.
Numerical Study on the Seakeeping Performance of USS Enterprise (CVN 65)
Zong Zhi Jiang Zong-yu Wu Zong-duo
Department of Naval Architecture, Dalian University of Technology, Dalian 116024, China
The HydroSTAR is a version of commercial hydrodynamic software which was developed by Bureau Veritas and seen as a tool suitable for the motion predictions of a wide range of floating structures in the waves.This paper aims to discuss the adaptability of the software to the seakeeping performance prediction of USS Enterprise (CVN 65).The calculation results derived from HydroSTAR were compared to that of the strip method.The author also calculated the significant value of hull motion utilizing P-M spectrum and compared the relevant value with recognized statistic value.Through analysis, it verified that the motion response of the carrier could well reflect the actual seakeeping performance,which is capable of evaluating seakeeping performance of aircraft carrier.
seakeeping performance; HydroSTAR; strip method; P-M spectrum; aircraft carrier
U661.32
A
1673-3185(2011)02-19-06
10.3969/j.issn.1673-3185.2011.02.004
2010-01-11
创新研究群体科学基金:海洋环境灾害与结构安全防护(50921001);国家重点基础研究发展计划项目:复杂装备研发数字化工具中的计算力学和多场耦合若干前沿问题(2010CB83270)
宗 智(1964-),男,教授,博士生导师。研究方向:船舶与海洋工程结构物设计制造。E-mail:zongzhi@dlut.edu.cn
