GPS接收机测量位移方法研究
2011-01-10齐占辉张锁平张东亮范有明
齐占辉,张锁平,张东亮,范有明
(国家海洋技术中心,天津 300112)
GPS接收机测量位移方法研究
齐占辉,张锁平,张东亮,范有明
(国家海洋技术中心,天津 300112)
首先介绍了全球定位系统(GPS)的工作原理;然后给出了利用多普勒频偏原理测量GPS接收机天线位移的方法;最后通过现场实验,对比GPS接收机天线的运动轨迹曲线和红球的运动轨迹曲线,验证了该测量位移方法的可行性。
全球定位系统;多普勒频偏;速度;位移
全球定位系统(Global Positioning System简称GPS)是美国从20世纪70年代开始研制,于1994年全面建成,以接收导航卫星信号为基础的非自主式导航与定位系统[1]。它能够向全球用户提供精确的三维空间位置信息、速度信息和时间信息。
GPS系统由24颗卫星构成,这些卫星分布在6个地心轨道平面内,每个轨道上有4颗卫星,相邻轨道的卫星之间间隔约为40°,卫星的运行周期约为11小时58分钟,每个运行轨道接近于圆形,并且沿赤道以60°的间隔均匀分开,轨道与赤道面的倾斜角为55°,从而保证了在地球上的任何地区和任何时间都能够观测到高度角15°以上的4颗卫星,进而能够推算出GPS接收机的空间位置信息。
GPS系统利用到达时间(TOA)的测距原理来确定接收机的位置。这种测距原理测量的是卫星发出的信号传播到达接收机所经过的时间,然后将这个信号传播时间乘以信号的传播速度,就可以得到卫星到接收机的测量距离R。由于这24颗卫星的三维空间位置坐标是已知的,根据数学公式推导可知,只要知道4颗或4颗以上卫星的测量距离R就可以解算出GPS接收机的三维空间位置坐标。
GPS系统因不同的定位服务,主要提供以下三种类型的原始观测值,即伪距、载波相位和多普勒频移。根据不同的定位精度要求,派生出单点定位、伪距差分定位、相位差分定位等多种定位模式[2]。
实际上,GPS系统定位的精度主要取决于使用GPS接收机的数目和解算算法的优劣。如果采用单机定位,其精度较差;如果使用双机进行差分定位,则可以很大程度地提高定位精度,如RTK-GPS是使用两部或两部以上的GPS接收机,将其中一部GPS接收机安装在三维空间位置坐标已知的固定位置处,该固定位置称为GPS基准站。GPS基准站根据本身的空间位置坐标信息和接收到的GPS信号信息计算轨道误差和大气误差造成的影响,然后根据影响计算出误差修正值,并把该误差修正值传送至其他GPS接收机上,及时解算出GPS接收机与GPS基准站之间的相对位置坐标,从而提高了GPS接收机的测量精度。然而RTK-GPS测量技术的应用也有诸多限制,比如必须至少有一个基准站,并且随着GPS接收机与基准站之间的距离增加,大气误差影响的改变,使得GPS接收机只能距离基准站约6~10 km才能达到厘米级的精度,因此其测量范围局限在特定的区域[3]。
1 利用多普勒频偏效应测量位移
对速度进行时间积分能够得到位移,因此可以通过测量GPS接收机天线的瞬时速度来计算其位移变化。GPS接收机测速大致有三种方法:第一种是基于GPS高精度定位结果,通过位置差分来获取速度;第二种是利用GPS原始多普勒观测值直接计算速度;第三种是利用载波相位中心差分所获得的多普勒观测值来计算速度[4-5]。
两个相对运动的物体之间会产生多普勒频率漂移现象,如果知道了一个物体的运动速度和多普勒频率偏移,就可以计算出另一个物体的速度。根据这一原理,由于GPS接收机与卫星之间存在相对运动,从而使GPS接收机接收到的信号频率与卫星发射的信号频率不同,因此只要知道GPS接收机接收到的信号频率与卫星发射的信号频率之间的频率差值和卫星的运动速度就可以计算出GPS接收机的瞬时运动速度。
GPS接收机的瞬时运动速度为[6]:

GPS接收机的运动位移为[6]:

式中:vr表示GPS接收机的瞬时运动速度;vs表示卫星的运动速度;fd表示多普勒频偏;fs表示卫星发射信号的频率;c表示电磁波在空气中的传播速度;Δt表示采样时间间隔;Δd表示GPS接收机在时间Δt内的位移。
根据公式(1)和公式(2)就可以计算出GPS接收机天线的位移变化。
2 现场实验与分析
为了验证GPS接收机利用多普勒频偏效应测量天线位移方法的可行性,用采样率为1 Hz的GPS接收机、刻度水尺、支架、摄像机和计算机组成了测量GPS接收机天线位移的实验系统,如图1所示。以直立式刻度水尺为静态参考坐标系,GPS接收机天线和红球一起绑定在横杆的一端,横杆的另一端固定在支架上。当横杆做上下运动时,会带动GPS接收机天线和红球一起做上下运动,同时由旁边的摄像机拍摄天线和红球的运动轨迹图像序列。如图2所示,为摄像机拍摄的天线和红球在某一时刻的位置图像。经过图像处理,提取出GPS接收机天线和红球在垂直方向上的运动轨迹曲线;与此同时,GPS接收机天线的运动速度数据通过RS-232接口输入到计算机,经过计算得到GPS接收机天线在垂直方向上的运动轨迹曲线。对比这两条运动轨迹曲线,进而验证利用多普勒频偏效应测量天线位移方法的可行性。目,作为该像素处的平均像素值,这样得到的图像即为平均背景图像。

图1 现场实验图
首先介绍提取红球运动轨迹曲线的方法。如图3所示,为从原始图像序列中提取红球运动轨迹曲线的流程图,该流程图包括5个操作步骤,分别为平均背景图像操作、差值图像操作、图像灰度变换操作、图像二值变换操作和红球位置点操作,经过这些操作后就可以从原始图像序列中提取出红球的运动轨迹曲线。下面分别介绍这几个操作步骤。
步骤1:平均背景图像操作
该操作首先在图像序列中求出每个像素处所有图像的像素值之和,然后用每个像素处的像素值之和除以图像的数

图2 GPS接收机天线和红球在某一时刻的位置图像
步骤2:差值图像操作
差值图像操作是用图像序列中的每帧图像减去平均背景图像得到差值图像,对相减之后为负数的像素差值取绝对值作为该像素处的像素差值。
步骤3:图像灰度变换操作
原始图像序列中的所有图像都是24位RGB彩色图像,因此经过差值图像操作后的差值图像仍为24位RGB彩色图像,该差值图像需要经过图像灰度变换操作才能得到灰度差值图像。
步骤4:图像二值变换操作
选择合适的阈值,对灰度差值图像进行二值化操作,把灰度差值图像变换为二值差值图像。
步骤5:红球位置点操作
对二值差值图像,进行腐蚀化操作,去除噪声点,得到红球的图像区域,对红球图像区域取重心,得到红球的位置点。
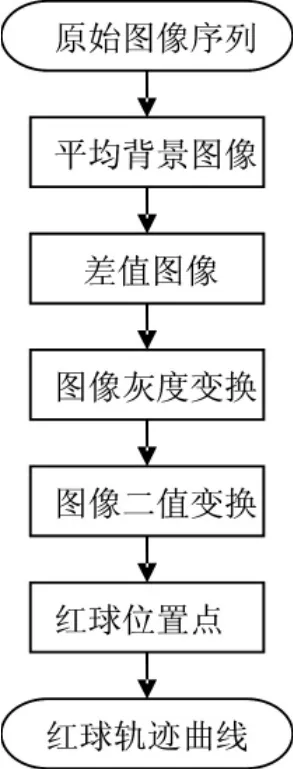
图3 提取红球运动轨迹曲线的流程图
如图4所示,为对原始图像序列中的某帧图像在提取红球位置点过程中的系列图像,图4(A)为平均背景图像,图4(B)为原始帧图像,图4(C)为图4(B)和图4(A)的差值图像,图4(D)为256色灰度差值图像,图4(E)为二值差值图像,图4(F)为腐蚀后的二值差值图像,从图4(F)中求出红球图像区域(即图中的白色区域)的重心,根据直立式水尺的刻度坐标,就可以换算得到红球的位置点。按照以上的操作步骤,在原始图像序列中,提取出每帧图像中的红球位置点,从而构成了红球的运动轨迹曲线。
在实验中,计算机采集了GPS接收机天线的速度数据序列,对速度数据序列进行积分,得到位移序列,位移序列在时间轴上展开就得到了GPS接收机天线在垂直方向上的运动轨迹曲线。
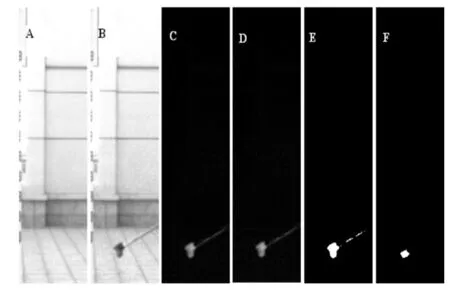
图4 某帧图像在提取红球位置点过程中的图像
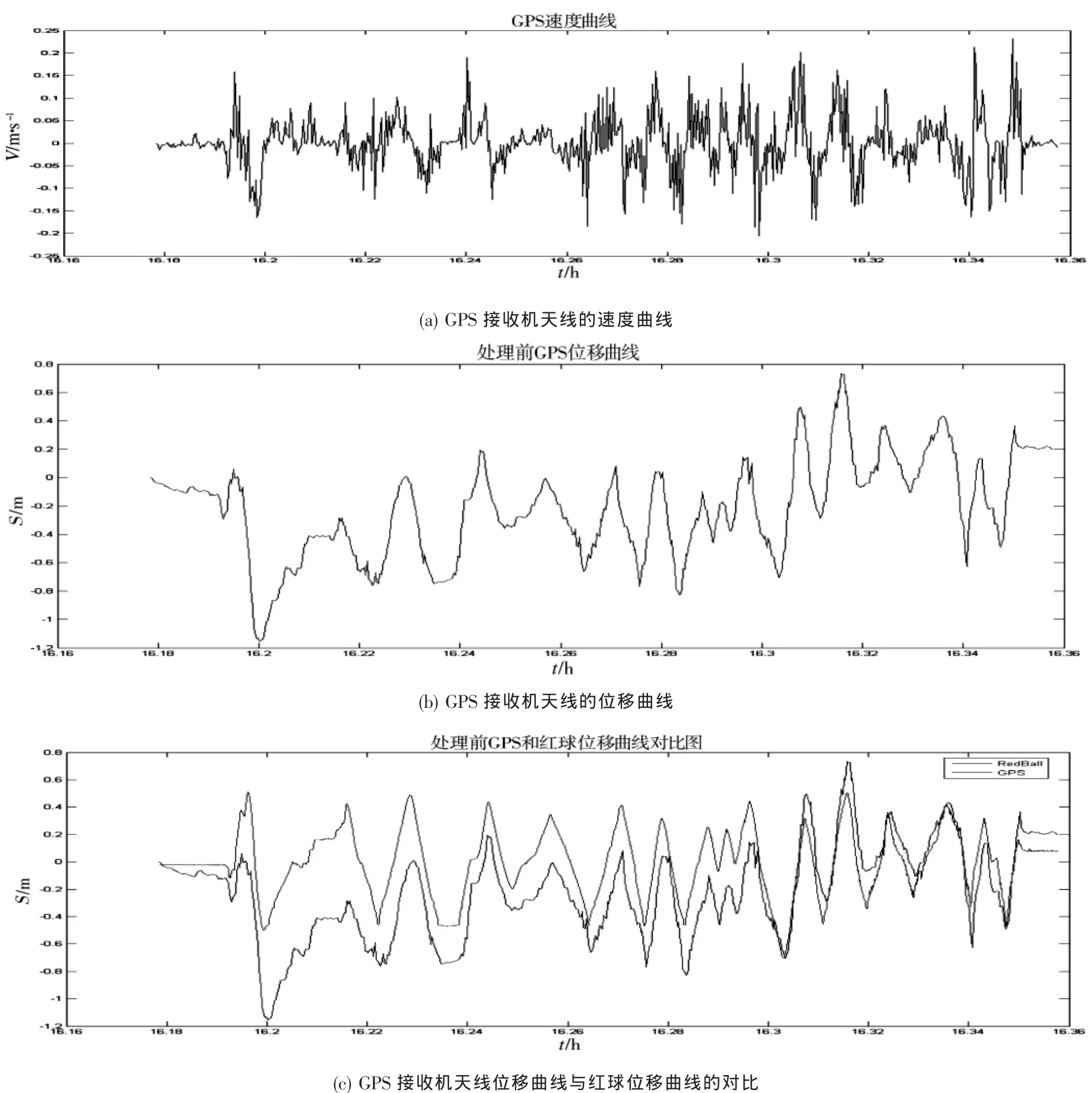
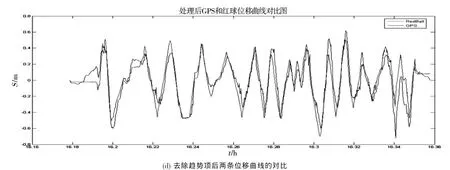
图5 第一组位移曲线的实验结果

图5为第一组位移曲线的实验结果。图5(a)所示为GPS接收机天线的速度曲线,对速度曲线积分得到图5(b)中的位移曲线,图5(c)为GPS接收机天线位移曲线与红球位移曲线的对比图,从图中可以看出,两条位移曲线的误差较大,一致性并不是很好,接收机天线位移曲线存在明显的漂移趋势。造成这种情况的原因初步分析是由于采集到的GPS接收机天线的速度数据序列中存在着个别错误的速度值,使在由速度序列积分得到位移序列的过程中,造成了零点漂移、误差累积,从而出现了错误速度数据点后面的轨迹曲线整体上移或下移的现象,图5(d)是从GPS天线的位移曲线中去除趋势项后两条位移曲线的对比图。图6(a)~(d)为另外四组数据的实验结果,在这四组实验中均去除了GPS接收机天线位移曲线的趋势项。

图6 另外四组数据的实验结果
从以上五组实验结果可以看出,GPS接收机天线的运动轨迹曲线与红球的运动轨迹曲线有非常好的一致性,两条位移曲线的形状几乎相同;但曲线的个别地方也有比较大的误差,特别是在GPS接收机天线的运动方向发生改变时,位移曲线的拐角点处误差较大,另外在红球静止的地方,有时GPS天线也会有微小的位移变化。上述误差产生的原因初步分析是由于GPS系统存在着测速误差,其误差源有多种[7],比如卫星轨道误差与卫星钟差、卫星速度误差、卫星钟速误差、相对论效应、对流层与电离层时延变化率、接收机位置误差、多普勒观测值误差等;另外,GPS系统载波相位测量存在着整周模糊度与周跳的问题[8],也可能会对GPS测速产生影响。更好的提高测量精度的措施有待进一步的研究。
3 结论
本文首先介绍了全球定位系统(GPS)的工作原理,给出了利用多普勒频偏原理测量GPS接收机天线位移的方法,然后做了GPS接收机天线运动轨迹曲线和红球运动轨迹曲线的对比实验,并给出了从图像序列中提取红球运动轨迹曲线的方法。通过实验可知,两条轨迹曲线有非常好的一致性,曲线形状几乎相同,但由于个别错误速度点的误差累积,出现了零点漂移、曲线整体上移或下移的现象,但该实验仍验证了利用多普勒频偏原理测量GPS接收机天线位移方法的可行性。下一步要做的主要工作是采用数据质量控制方法,减小速度序列的测量误差,进一步提高测量精度。
[1]赵志礼,孟庆辉,张松涛,等.基于单片机的GPS定位信息处理[J].电子测试,2009(10):45-48.
[2]杨龙,刘焱雄,周兴华,等.GPS测速精度分析与应用[J].海洋测绘,2007,27(2):26-29.
[3] 杨名.公分级 GPS 卫星即时动态定位系统[J].测量工程,1997,39(4):1-18.
[4]Ryan S,Lachapelle G,Cannon M E.DG-PS Kinematic Carrier Phase Signal Simulation Analysis in the Velocity Domain[C]//Proceedings of ION GPS 97,Kansas City:[s.n],1997.
[5]Szarmes M,Ryan S,Lachapelle G.DGPS High Accuracy Aircraft Velocity Determination Using Doppler Measurements[C]//Proceedings of the International Symposium on Kinematic Systems(KIS),Banff:[s.n.],1997.
[6]张锁平.单点GPS浮标测波方法与数据质量控制研究[J].海洋技术,2008,27(3):15-18.
[7]王甫红,张小红,黄劲松.GPS单点测速的误差分析及精度评价[J].武汉大学学报,2007,32(6):515-519.
[8]滕云龙,师奕兵.GPS载波相位测量数据的时间序列分析建模研究[J].电子测量与仪器学报,2009,23(9):18-22.
Research on Displacement Measurement Based on a GPS Receiver
QI Zhan-hui,ZHANG Suo-ping,ZHANG Dong-liang,FAN You-ming
(National Ocean Technology Center,Tianjin 300112,China)
The working principle of Global Positioning System is introduced firstly.Then,the method based on Doppler frequency shift principle for measuring a GPS receiver antenna’s displacement is proposed.The GPS receiver antenna’s trajectory curve and the red ball’s trajectory curve are compared through the field experiment finally,which verifies the feasibility of the method.
Global Positioning System;Doppler frequency shift;velocity;displacement
P715
A
1003-2029(2011)03-0035-06
2011-02-01
2011年国家海洋局青年科学基金—基于单点GPS传感器的测波技术研究资助项目(2011420)
齐占辉,男,硕士,助理工程师,研究方向为海洋观测技术。
