基于ADAMS和SolidWorks的印刷机凸轮传动系统的建模与仿真
2010-08-23袁安富相立峰
袁安富,相立峰
YUAN An-fu, XIANG Li-feng
(南京信息工程大学 信息与控制学院, 南京 210044)
0 引言
虚拟样机(Virtual Prototype)技术是一种基于产品计算机仿真模型的数字化设计方法,这些数字模型即虚拟样机支持并行工程方法学[1],已经广泛地应用于设计和制造领域,其中在机械制造业,采用分析软件ADAMS较为普遍。机械产品在设计阶段,通过虚拟设计和制造后,可以尽早地发现原设计方案所存在的问题,并且根据设计指标要求,对某些参数进行优化,极大地降低设计成本、同时也减少了设计时间。
具体对于印刷行业而言,虚拟设计和制造也得到了广泛的应用,如在文献[2]中提到在ADAMS里面建立印刷机的送纸机构的三维模型,并且对其机构进行动态仿真分析,分析机构的相关特性并对其相关参数进行优化,在文献[3]中给出了印刷机虚拟样机系统实现策略,等等。在本文中主要根据某型号的印刷机功能要求,在SolidWorks软件中建立该机构的凸轮传动机构,再将建好的机构导入到分析软件ADAMS中进行仿真分析,分析系统的相关性能指标,从而确定优化的目标,为印刷机凸轮传动系统的设计和制造提供一定的依据。
1 凸轮机构的性能指标要求
凸轮机构广泛地应用于纺织机械、印刷机械和农业机械当中。在一般的情况下,希望设计出来的凸轮机构要有较好的传力特性,同时结构紧凑,因此要求具有较大的压力角和较小的基圆半径,所谓的压力角,是指在不计摩擦的情况下,凸轮对从动件作用力的方向线与从动件上力作用点的速度方向之间所夹的锐角[4],所谓的基圆半径是指以凸轮轮廓曲线的最小向径 为半径所作的圆称为凸轮的基圆,其半径 为基圆半径[5]。在其他条件不变的情况下,基圆半径越小,压力角越大,基圆半径过小,压力角会超过许用值而使机构效率太低甚至发生自锁,因此,在设计凸轮机构时,应兼顾两者统筹考虑,使得在压力角小于许用值的前提下,尽可能小的选取基圆半径,使凸轮机构性能指标最优。
本文所讨论的凸轮机构是印刷机上的一个送纸结构,它由凸轮、滚轮、从动件和一系列的连杆组成。该凸轮结构的主要作用就是在印刷过程中传递纸张,在其工作过程中,要求该机构从动件的运动到某一时段与凸轮机构相等,而且整个运动过程为一个平稳的运动过程,按照该型号印刷机功能要求,其凸轮机构传动原理图如图1所示,该机构运动关系为:凸轮2由外力驱动,如电机等等,凸轮“2”与凸轮“3”为一对共轭凸轮,由于滚轮4始终保持与凸轮2接触,这样就由凸轮2带到滚轮4转动,再由滚轮4带到连杆7、连杆8、连杆9、连杆10、连杆11和连杆12运动,最终带到从动件6运动,图中“14”和“15”是两个支点,它们在支点处绕其中心线旋转。

图1 该型号印刷机凸轮机构传动原理图
2 凸轮传动系统的建模
根据上述要求,本文采用Solidworks软件建立了该凸轮机构的三维模型。并将该三维模型导入到ADAMS软件中进行相关性能的分析。通过分析,达到以下三个目的:
1)检验整个模型的正确性,特别是凸轮机构,是否符合工作要求;
2)分析从动件6运行的速度,是否符合印刷机实际的工作要求;
3)分析从动件6角加速度运行情况,检验角加速度响应曲线是否连续,是否存在冲击,能否保证系统平稳地运转,通过分析,要确定优化的目标,影响因数等等。
本文中采用造型软件Solidworks建立该机构的凸轮传动系统,按照上述凸轮机构传动原理图,该凸轮传动系统主要包括凸轮、滚轮、从动件和各式的连杆,滚轮、从动件和各式的连杆直接运用SolidWorks里面的相关功能可以直接建立,凸轮由于其轮廓曲线的不规则性,其设计相对比较复杂,因此就凸轮的设计作简单的介绍。在设计凸轮轮廓线之前,先要确定滚轮的运动规律,常选用的运动规律有多项式类运动规律、三角函数类运动规律、以及各类修正型运动规律等等,本文中采用多项式类中的三次多项式运动规律,通式
如下式(1)所示。

其中:s表示滚轮质心的位移,c0、c1、c2和c3为待定的系数。
通式边界条件为
则可以建立下面的方程组
这里的凸轮轮廓曲线采用多段进行,共分为五段设计,其中第二段和第四段分别处于凸轮的近休和远休,滚轮保持静止不动,因此只要确定第一段、第三段和第五段的初始位置,代入方程(2),就可以求得各段滚轮的运动规律,再采用解析法计算出凸轮轮廓上若干个点,将这些若干个点用光滑的曲线连接起来,就生成了凸轮的轮廓曲线,最后采用SolidWorks软件中的拉伸功能将定义好的轮廓曲线进行拉伸就生成了凸轮。其他的部件直接运用SolidWorks软件中的相关功能可以设计出来,所有的部件全部设计完,可以在SolidWorks软件的装配体的环境中装配好整个系统,这里不再赘述,如图2所示,按照上述凸轮机构原理,凸轮“2”与滚轮“4”和凸轮“3”与滚轮“5”在几何关系上始终保持外切,这样就能达到上述运动目的,凸轮“2”和“3”的中心、中心轴“1”的中心和固定板“11”的几何中心共线,各个连杆如图中连接好,在连接处两个构件保持同心。

图2 凸轮传动系统的仿真模型
3 凸轮传动系统的分析和仿真
3.1 仿真条件及仿真相关参数的设置
首先将上述的凸轮传动系统从SolidWorks软件中导入到ADAMS环境里面,导入后选择菜单Tools下的Model Verify命令,从得到的Information对话框中的最后一行Model verified successfully得知建立的模型是正确的,并定义好各个模块的材质,这里所有的模块全部定义为钢(steel)。
按照上述的凸轮传动系统运动关系,定义系统中的约束关系,在定义约束关系之前可以适当的进行一些布尔运算,以简化模型,以提高仿真精度,其中最主要的有两个,一个是保证滚轮和凸轮在运动过程中始终接触,所以要在滚轮和凸轮之间定义线线副,另一个就是定义两个支点,满足原理图的要求和整个系统的运动关系,两个支点分别定义在图2中的“12”处和“13”处,如表1所示。

表1 滚轮与凸轮的接触的约束和支点的定义
滚轮4转动以后就带动连杆7、连杆8,连杆9和连杆10,从而使得从动件6运动起来,它们之间的主要运动关系如表2所示。

表2 系统中其他主要的约束关系
在机械系统中,当两个构件的表面之间发生接触时就会产生接触力,ADAMS里面有两种接触力:二维(2D)接触和三维(3D)接触,有两种方法计算法向力:基于回归的接触算法(Restitution-based contact)和基于碰撞函数的接触算法(IMPACT-Function-based contact)。在此凸轮传动系统中定义凸轮2与滚轮4和凸轮3与滚轮5之间的接触力,定义类型均为实体与实体(Solid-Solid),接触力的类型为IMPACT,因为上述构件均为钢,所以定义刚度系数(Stiffness)为100000N/mm,指数(Exponent)为1.5,阻尼系数(Damping)为50 N s/mm,渗透系数(Penetration)为0.1mm。同时,为了仿真的结果更加符合实际,还定义它们之间的摩擦力,定义了静摩擦系数(Static Coefficient)为0.3,动摩擦系数(Dynamic Coefficient)为0.25,静态临界速度值(Static Transition Velocity)为0.1mm/sec,动态临界速度值(Friction Transition Velocity)为10mm/sec。
3.2 仿真结果
在固定板11和中心轴1的Revolute Joint1添加驱动Rotational Motion,设置匀角速度为 ,设置仿真,仿真时间为 ,进行仿真。仿真完进入PostProcessor界面,测出想要的构件的性能指标,结果如图3和图4所示。
3.3 结果分析
从图3和图4的仿真结果中可以得到以下的结论:

图3 仿真后的响应曲线
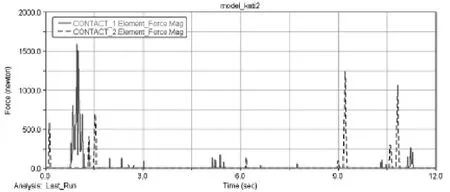
图4 凸轮与滚轮接触力的响应曲线
1)图3中的曲线1是滚轮4质心的位移响应曲线,从中经过一定的计算出有关凸轮的性能指标,完全符合要求,滚轮的中心与凸轮的中心的偏转角为 ;
2)图3中的曲线2为从动件6质心运行的速度,与实际吻合;
3)图3中的曲线3为从动件6质心的角加速度,从中可以看出在开始位置存在着一定的冲击,因此需要对此进行优化,使得曲线变化连续,从而使得从动件11运转平稳,经研究表明,影响因素有两个,一个是各个连杆的长度,另一个就是凸轮的形状;
4)图4为凸轮与滚轮的接触力的响应曲线,从中发现刚开始的接触力过大,这正是图3中从动件6质心角加速度冲击存在的重要原因,需要注意的是,图4中接触力为0的地方并不表示凸轮与滚轮不接触,而是因为这里定义的接触类型为IMPACT,根据ADAMS中的IMPACT函数的定义,只有当其两个标识点MARKER I和J之间的距离小于所定义的开关量时接触力才为非零,否则接触力均定义为0,所以这里的接触力为0表示此时的MARKER I和J之间的距离大于或等于所定义的开关量,另外对接触力的研究分析还有一个更重要的意义,接触力过大会导致凸轮与滚轮磨损严重,长时间的这样,会使得凸轮与滚轮之间间隙变大,这样会使得系统的传动效率减低,甚至会缩短整个系统的寿命。
4 结论
研究表明,通过SolidWorks软件建立模型再导入到ADAMS里面进行仿真分析是一种可行的方法,它可以有效地克服ADAMS软件建立复杂模型带来的问题,通过仿真分析可以得到各个部件的位移、速度、加速度等等相应的响应曲线,发现模型中存在的问题,以便有效地确定优化的目标,为物理样机的制造提高一定的依据,节约产品研发的时间和成本。
[1]郭卫东.虚拟样机技术与ADAMS应用实例教程[M].北京:北京航空航天大学出版社,2008.
[2]张峻岭,韩晓东.印刷机送纸机构虚拟设计[J].包装工程2006.12
[3]齐元胜,王晓华,郭俊忠.印刷机分布式虚拟样机系统及实现策略的研究[J].系统仿真学报,2006,8.
[4]申永胜.机械原理教程(第2版)[M].清华大学出版社,2005.
[5]常治斌,张京辉.机械原理[M].北京大学出版社,2007.
[6]石永刚,吴央芳.凸轮机构设计与应用创新[M].机械工业出版社,2007.
[7]付永忠.SolidWorks 2007完全自学手册[M].科学出版社.北京希望电子出版社.2007.
[8]韩晓明,王惠源.基于ADAMS/View机心凸轮机构分析与动态仿真[J].机械工程师,2005,10.
[9]MDI公司.Using ADAMS/View [Z].
[10]MDI公司.Using ADAMS/PostProcaessor [Z].
[11]K.洛克(Kurt Luck),等.机械原理[M].机械工业出版社,2003.
[12]王三民,等.机械原理与设计[M].机械工业出版社,2001.
[13]李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2008.
[14]陈立平,张云清.机械系统动力学分析与ADAMS实用教程[M].北京:清华大学出版社,2006.
[15]范成建,等.虚拟样机软件MSC.ADAMS应用与提高[M].机械工业出版社,2006.
