飞机惯性传感器测试系统研究与设计
2010-07-31李跃东
李跃东
(空军第一航空学院,河南 信阳 464000)
1 引言
负角加速度产生装置用来模拟飞机着陆减速滑跑过程中机轮角速度的变化,广泛用于我军各型歼敌飞机防滑刹车系统惯性传感器的性能测试。惯性传感器是飞机自动防滑刹车系统核心部件,直接关系到飞机飞行安全。因此,测试准确、操作简便、综合性强的惯性传感器测试设备,是保证飞机着陆安全,提高飞机维修能力、发挥飞机战斗力的重要保障。目前,歼敌飞机各制造单位、修理单位、部队所使用的惯性传感器测试设备仍是五、六十年代引进的俄式产品,存在着技术落后、操控特性差,测试精度不高等诸多问题,亟待解决。
2 传统负角加速度产生装置简介
现役老式(俄式)惯性传感器测试设备是利用偏心曲柄机构(如图1所示),通过机械传动方式产生负角加速度。其主要工作部分是一个偏心曲柄机构。它由偏心轴、主轴、曲柄等组成。偏心轴和主轴的轴线间有一个偏心距e,主轴转动时,通过圆盘、滑块和曲柄传动偏心轴,使它也产生转动。滑块既作旋转运动,又作直线运动,滑块通过短轴带动偏心轴旋转。滑块作直线运动时,就使主轴与短轴的中心距作周期性变化。当角速度ω由大变小时,按图2几何关系可推导出输出轴的角加速度表达式为:

ω-主轴的角速度;r-短轴至偏心轴距离
由上式可以看出,输出轴的负角加速度与偏心距和转速有关,测量负角加速度只能通过间接测量偏心距,通过理论推导计算得到,不是实测值,数据准确性差。
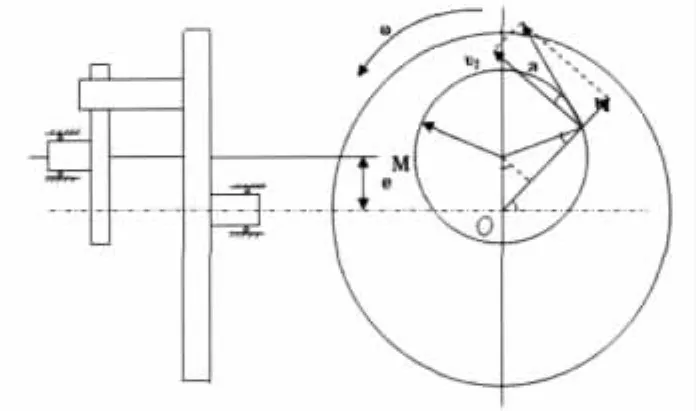
图2 传动几何关系
3 新型负角加速度产生与控制系统
3.1 组成与工作
新型负角加速度产生装置是以伺服电机为核心的、具有转速反馈的计算机控制系统如图3所示。该系统由计算机、高精度伺服电机、伺服电机驱动器、辅助电路等组成。
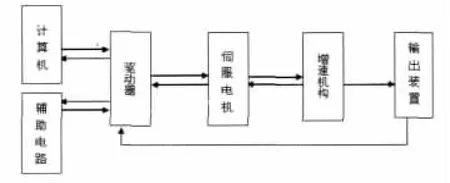
图3 伺服电机控制系统
伺服电机是整个系统的执行元件,输出转速和负角加速度。伺服电机的核心部件是电子码盘、50对磁极和转子,转速可达3000转/分,输出的最大负角加速度可以达到1000弧度/秒2。工作时,驱动器首先将参数进行运算处理,然后发送给伺服电机,电机就按照给定的参数进行运转,输出所设定的转速和负角加速度,同时电子码盘感受伺服电机的转速和负角加速度,并将信号反馈给驱动器,经过驱动器运算和上位机的参数比较,得到电机调整偏差,然后再将调整偏差返回给电机,从而使得电机的输出转速和负角加速度严格按照给定的参数运行。
3.2 负角加速度产生原理
SU-2军用飞机惯性传感器(YA58)测试时,要求转速960n/min时,负加速度在325~475 l/s2范围内变化。即,在一定的平均转速下产生一定的负角加速度。传统偏心曲拐机构生成负角加速度时,齿轮箱的传动比为1:6.25,对应的驱动电机转速为960÷6.25=153.6 r/min。根据偏心曲拐机构的工作原理,偏心轮每转一圈,输出轴应对应一个加速减速过程,即一个周期。也就是说输出轴在平均转速为960r/min的前提下,每分钟应有153.6个加减速周期。
根据这个要求,我们设计了伺服电机的运行控制规律(如图4所示)。在伺服电机控制系统中,输入轴和输出轴的速比为3:1,因此,伺服电机的转速应为960÷3=320 r/min,每分钟要完成153.6个加减速周期(每秒153.6÷60=2.56个),每个周期 T为 1/2.56=0.4s。
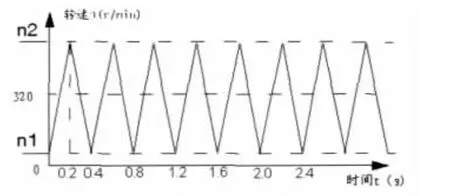
图4 电机运行规律
又:n1+n2=640(电机平均转速 320)
这里,T=0.4s
测试时,在程序上设定周期T,从计算机输入被测产品的最小负角加速度值325 1/s2,系统自动计算n1、n2值,电机将依次以325/3、330/3、335/3、340/3、345/3 1/s2……,伺服电机就在计算机控制下按预定规律作周期性加减速转动,输出325~475 l/s2的负角加速度。从(1)式可以看出,改变周期T和转速n1,n2就可得到不同得负角加速度。
4 结论
惯性传感器测试设备的基本功能就是产生与飞机机轮减速过程中相同的负角加速度,其核心是负角加速度产生装置。随着现代计算机控制技术、微电子技术的发展,负角加速度的产生的方法和设备将越来越多。利用伺服电机控制系统的技术特点,通过对下位机的编程,在变转速、变负载的情况下,准确的实现了电机以特定负角加速度运行是飞机惯性传感器测试设备领域的技术创新,代表了这一领域的发展方向。
[1]姜荣.一种基于运动控制卡的伺服电机控制系统[J].机电产品与开发,2006(3)
[2]《YA58型自动防滑装置技术条件》.中国人民解放军第五七二零工厂
[3]程明学.歼七飞机附件修理.空军第一航空学院出版,1999.
