水下机器人在浙江省水库大坝检测中的初步应用
2010-07-02李钟群孙从炎蒋晓旺葛双成
李钟群,孙从炎,蒋晓旺,葛双成
(1.浙江省水利科技推广与发展中心,浙江 杭州 310012;2.浙江省水利河口研究院,浙江 杭州 310020)
1 问题的提出
由于独特的地理位置和气候条件,浙江历来是洪涝干旱灾害的多发地区。据不完全统计,目前全省已建水库3 940余座,总库容350多亿m3,不仅从根本上减少了洪涝灾害的发生,极大地促进了工农业生产的发展,而且已成为城乡居民生活质量和经济社会可持续发展的基本保障。但是,这些水库工程大多建于20世纪五六十年代,由于受当时财力、物力和技术条件等方面的限制,工程质量往往先天不足”,尤其是中小型水库普遍存在设计标准偏低、施工质量不高、设施老化破损或不完备等问题,水库病险隐患严重影响经济社会发展和人民生命财产安全。为此,浙江省从2003年开始启动了“千库保安”工程,实施除险加固和技术改造。由于受到各种因素的限制,如何有效地检测水下结构和设施的运行状况是水库除险加固和日常管理过程中经常面临的重要课题。
浙江省水利科技推广与发展中心和浙江省水利河口研究院共同实施的水利部“948”项目 “小型遥控水下机器人(ROV)系统”,将水声技术、水下摄像、水下声纳、水下定位和机器人技术相结合,具有个头小、操作灵活、图像清晰、功能强大等特点,可以让专业技术人员对水库大坝等水下结构状况进行直观了解,快速有效地查明水库大坝水下工程结构的隐患所在及严重程度,对水库工程除险加固设计和大坝安全日常管理具有十分重要的作用。
2 水下机器人 (ROV)系统简介
ROV水下机器人由水下潜器、机械臂、控制台、短基线定位系统和二维多波束图像声纳等组成。水下潜器配有1个前视彩色摄像头、1个后视黑白摄像头、2个LED灯、2个水面推进器和1个垂直推进器。它的最大潜深达到300m,脐带缆150m,最大行进速度2.10m/s,前摄像头分辨率:570线分辨率、0.3l ux广角彩色摄像头;180°俯仰“摇头”范围;后面摄像头:430线分辨率、0.1l ux黑白摄像头 (固定焦距)。通过控制台可以对水下潜器进行控制以实现机器人移动、机械臂开关和摄像头角度控制及调焦,并将水下拍摄的图像经线缆传输到显示屏的同时存储至笔记本电脑。
短基线定位系统(Pilot)是一个声学跟踪系统,Pilot使用34~42 kHz的高频跟踪信号,主要功能是跟踪水下潜器,通过定位得到机器人在水下作业时的位置的可靠信息。短基线定位系统由水面3个声学换能器、定位软件、目标上的应答器组成。系统得到的是水下目标相对于3个换能器组成的参考相对位置,并在笔记本电脑上以雷达图的形式进行显示,以便对水下目标进行相对位置定位。如果将系统连接GPS/DGPS,则可得到ROV的绝对位置和水面位置。
二维多波束图像声纳类似手电筒,声纳发射的声波遇到目标后部分声能量反射回声纳表面,声纳系统将该回波接收并处理,根据发射声波—回波的时间长短可测量目标距离声纳的距离;根据回波强度的大小可以获得目标反射声波能力的强弱。通常,声学硬目标 (如石头、钢板)反射声波的能力强于声学软目标 (如橡胶块、水、薄壳空气腔等);软件处理过程中可根据反射信号的强弱,将其进行颜色编码,强回波信号用亮色(如红色或黄色)显示,弱回波信号用暗色 (如灰色或蓝色)显示,这样,不同的目标就可以在屏幕上用不同颜色的图像进行显示。二维多波束图像声纳系统可以使机器人在能见度较低的工作环境下实现对目标物体的定位和辨识。
3 实际工程应用
3.1 永康三渡溪水库大坝水下检查
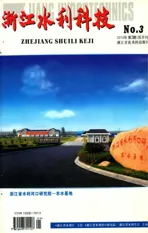
三渡溪水库总库容1 135万m3,是一座以灌溉为主,结合防洪等综合利用的中型水利工程。枢纽工程由大坝、溢洪道、发电输水隧洞及电站组成。三渡溪水库大坝坝型为“干砌块石钢筋混凝土斜墙重力坝”。坝顶高程202.26 m,基础高程159.76m,坝高42.5m,坝顶长175m,宽5.5 m。由于初期设计不标准及年久失修等原因水库大坝出现裂缝、位移等缺陷。由于三渡溪水库除险加固工程的需要,故对三渡溪水库进行了水下图像检查。检查的主要内容是三渡溪水库主坝水面以下大坝混凝土防渗面板表面情况(包括表面沉浆缝、拼接缝、止水橡皮、修补沥青、裸露钢筋等)、闸门、涵洞以及拦污栅等。检查的方法是将防渗面板进行分块分区,沿坝轴线方向自左向右每10m为一检查区域,在发现有缺陷的位置,通过水平方向采用岸上桩号、垂直方向采用自动水深的方法进行定位。在发现缺陷部位时,通过笔记本电脑对图像资料进行保存,并对缺陷部位的定位信息进行记录。在对检查的图像资料进行分析后发现大坝混凝土表面有一定缺陷,混凝土表面不平整,露出砂石,多处出现表层混凝土剥皮现象。在桩号0+104~0+105m/高程194~195m、桩号0+101~0+102m/高程 193~194m、桩号0+076~0+077m/高程194~195m等位置存在3处空洞 (缺损)。桩号0+099~0+102m/高程191~192m、桩号0+092~0+094m/高程191-193m、桩号0+052~0+054m/高程192~194m等位置存在3条裂缝。图1所示为空洞 (缺损)(桩号0+076~0+077m/高程194.72m)。
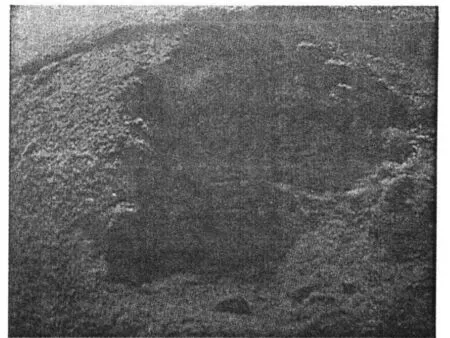
图 1 空洞 (缺损)图(桩号0+076~0+077 m/高程 194.72 m)
3.2 永康杨溪水库大坝水下检查
杨溪水库是一座以灌溉为主,结合防洪、供水、发电等综合利用的中型水库。水库坝址以上集雨面积124 m2,水库总库容6 453万m3。杨溪水库工程属III等工程,主要建筑物由大坝、副坝、坝顶泄洪闸、输水系统和电站组成。检查的主要内容是杨溪水库水面以下大坝混凝土防渗面板表面情况 (包括表面沉浆缝、拼接缝、止水橡皮、修补沥青、裸露钢筋等)。检查的方法是将防渗面板进行分块分区,沿坝轴线方向自左向右每10m为一检查区域,在发现有缺陷的位置,通过水平方向采用岸上桩号、垂直方向采用自动水深的方法进行定位。在发现缺陷部位时,通过笔记本电脑对图像资料进行保存,并对缺陷部位的定位信息进行记录。根据此次检查的图像资料显示,大坝混凝土表面不平整,露出砂石,几处出现表层混凝土剥皮现象,几处伸缩缝存在水泥脱落和开裂现象,坝墩与坝面连接处有一定出现开裂现象。在桩号 0+132~0+128地m/高程142.7m、桩号0+140~0+138m/高程142m、桩号 0+124~0+120 m/高程 137.5 m、桩号0+110~0+102 m/高程134.0m、桩号 0+119 m/高程142.2m、桩号0+105~0+102m/高程140m、桩号0+124~0+120m/高程142m等位置存在7条裂缝。图2所示为桩号140~138m/高程142 m处的裂缝。
图2 桩号0+140~0+138 m/高程142 m处裂缝图
3.3 金华沙畈水库大坝水下检查
沙畈水库以供水、灌溉为主,结合发电、防洪等综合利用的浙江省重点水利建设项目。控制流域面积131 km2,总库容8 555万m3,大坝类型是细骨料砌石重力坝,坝高76m,坝顶长273m。检查的主要内容是沙畈水库水面以下大坝混凝土防渗面板表面情况(包括表面沉浆缝、拼接缝、止水橡皮、修补沥青、裸露钢筋)、闸门、涵洞以及拦污栅等。检查的方法是将防渗面板进行分块分区,沿坝轴线方向自左向右每10m为一检查区域,在发现有缺陷的位置,通过水平方向采用岸上桩号、垂直方向采用自动水深的方法进行定位。在发现缺陷部位时,通过笔记本电脑对图像资料进行保存,并对缺陷部位的定位信息进行记录。根据这次检查的图像资料显示,大坝混凝土表面整体良好,但局部部位也存在麻面、蜂窝等缺陷。
4 水下机器人检测的特点
根据永康三渡溪水库和杨溪水库,金华安地水库和沙畈水库等大坝及出水口的水下图像检查情况及工作体会,水下机器人(ROV)系统具有以下特点。
下潜深度大:最大潜深达到300 m,脐带缆150 m,可以满足现在省内所有水库大坝的检测。行进速度快:最大行进速度2.10m/s,可以大大的提高检测效率,基本在1个星期内完成1个水库的检查工作。水下摄像头分辨率高:在较好的水体环境条件下,可以清晰显示水库大坝裂缝、空洞(缺损)等破损和病变现象。当发现裂缝、空洞(缺损)等破损病变问题时,可通过定位系统进行定位,并对缺陷部位进行记录。在水质条件较差的情况下,通过水下机器人携带的二维多波束声纳可以实现对目标的定位和辨识。可通过脐带缆将水下视频传输到笔记本电脑,进行分类保存,得到水库大坝、水闸等水下工程设施运行现状的较直观图像。
但是,水下机器人 (ROV)系统在工程应用中仍存在较大的局限性。只能发现水库大坝、水闸等水下工程设施的表面情况,无法检查内部缺陷。在水体浑浊和表面附着物较多的条件下无法检查缺陷的细致情况,只能通过声纳系统形成一个抽象的多波束声纳成像图。即便对裂缝、空洞 (缺损)等表面缺陷,无法准确量测其长度、宽度、深度,也难以精确定位。水下机器人通过脐带缆与控制台连接,在水下结构复杂的情况下,脐带缆非常容易发生缠绕、划伤等现象。
5 结 语
浙江省众多水库大坝和水闸存在着不同程度的裂缝、渗漏等隐患,应用水下机器人 (ROV)系统开展水下检查工作,对水库大坝安全鉴定和除险加固,使水库发挥应有的社会效益和经济效益,具有较重要的意义。