电动助力转向系统双闭环模糊PID控制系统分析
2010-04-11魏万迎殷国富田大庆
魏万迎,殷国富,田大庆
WEI Wan-ying1,2, YIN Guo-fu1, TIAN Da-qing1
(1. 四川大学 制造学院,成都 610065;2. 成都大学 电子信息学院,成都 610106)
电动助力转向系统双闭环模糊PID控制系统分析
Analysis on eps machitrical fuzzy dual closed-loop control system
魏万迎1,2,殷国富1,田大庆1
WEI Wan-ying1,2, YIN Guo-fu1, TIAN Da-qing1
(1. 四川大学 制造学院,成都 610065;2. 成都大学 电子信息学院,成都 610106)
电动助力转向系统(EPS)是机电结合的控制系统,电流PID控制是以目标电流和反馈电流为差值的闭环控制系统,模糊控制是以机械转向轴取差值的机电闭环控制系统,本文以力矩反馈环为外环,电流反馈环为内环,设计了一个双闭环控制系统。将模糊PD控制的输出作为助力目标值,然后进行电流PID控制,快速跟踪目标力矩。 经仿真模拟, 双闭环模糊PID控制使电动助力转向系统具有更好的跟踪性和稳定性。
助力转向;电流PID控制;模糊控制;模糊PID控制;机电双闭环
0 引言
电动助力转向系统(EPS)是目前车辆转向系统的研究热点。转向系统的作用是可靠、稳定的调节车轮方向,但从实质上讲,这是由驾驶员来完成的,助力转向系统的主要功能是使驾驶员操作更方便舒适、使转向更加稳定可靠。
电动助力转向系统(EPS)在助力时是一个力跟随随动系统,由扭矩传感器测得转向柱扭矩,经控制器以一定算法处理后产生控制信号,经H桥驱动电路输出电压U到电机电枢上,驱动电机产生助力转矩。目前控制器实际使用的控制算法以电流PID(PD) 控制和模糊控制较为普遍,前一种是电机电枢电流反馈形成电流差值PID控制,后一种是通过转向柱角度的机械反馈形成角度差值(反映为扭矩)控制,后者通常采用模糊控制,或模糊自适应PID控制。为提高控制性能,本文在不增加硬件的条件下,将两者结合,形成模糊PID机电双闭环控制策略来提升控制效果。经仿真,模糊PID双闭环控制系统电动助力转向系统(EPS)的跟随能力得到增强。
1 EPS建模系统
把汽车前轮和转向机构向转向轴简化,得到简化后的转向系统模型如图1 所示。汽车电动助力转向系统主要部件包括:扭矩传感器、车速传感器、电流传感器、电子控制单元(Elec- tric Control Unit ,简称ECU) 、直流电动机和带离合器的减速机构。扭矩传感器检测到的扭矩信号、车速传感器检测到的车速信号和电流传感器检测的电机电枢电流信号送入ECU,根据车速信号和扭矩信号决定电动机的目标电流的大小;反馈的电机电枢电流经PID电流控制跟踪目标电流,决定电机助力矩, 以保证汽车在低速行驶时轻便灵活, 高速行驶时稳定可靠。
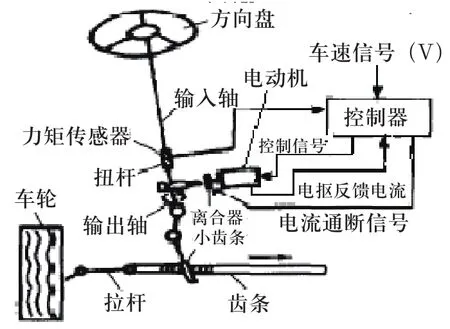
图1 转向系统模型示意图
2 转向柱受力形成扭矩Ts
研究的电动助力转向系统是转向柱助力式转向系统, 驾驶员手力Tsw通过转向盘施加到转向柱的上部;电机助力Tm经减速装置
加到转向柱的下部,旋转方向与Tsw
相同;路面阻力TR 由传动结构作用于转向
柱的下部,旋转方向与Tsw相反;转向柱上的扭矩传感器反映了转向柱的形变,转向柱上、下部的作用力矩差值决定转向柱的形变角Δ,扭矩Ts由角度Δ决定。
当Tsw增大,Δ增大,Ts增大;
当Tm增大,Δ减小,Ts减小;
当TR增大,Δ增大,Ts增大;
即:在转向柱上,
Ts = Tsw + TR-Tm = Tsw-(Tm-TR)
或:Tsw = Ts + (Tm-TR)
3 控制策略分析
通常采用的控制策略有两种方法,一种是机电闭环反馈模糊控制,由机械部件转向轴反映出上下部力矩差值,由Ts表示,在ECU中,作PD运算后,输出电机控制电压:
Ud = KpTs + Kd dTs/dt
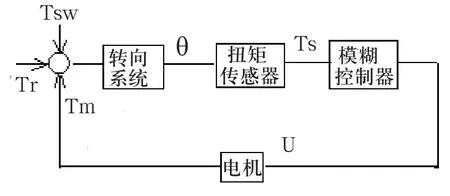
图2 模糊控制示意图
模糊控制器我们采用常见的二维结构,以误差和误差的变化率为输入,以控制量的目标值为输出。模糊控制器为Mamdani型,去模糊化采用重心法。定义E、Ec、U模糊量的模糊子集均为{NB,NM, NS,ZO, PS, PM, PB },分别表示负大、负中、负小、零、正小、正中和正大,E和Ec的论域均为[- 6, 6], U的论域为[0, 12]。
另一种是电流闭环PID反馈控制,根据车速信号和扭矩信号根据经验和实验数据得到助力特性曲线,由此决定电动机的目标电流I的大小,再从电流传感器检测出电机电枢电流Im,在ECU中,算出电流差值,经PID运算,输出电机电压控制信号:
Ud = Kp(Ia-Im) + Kd d(Ia-Im)/dt
电流闭环PID反馈控制能够加快对目标转矩的跟随能力。
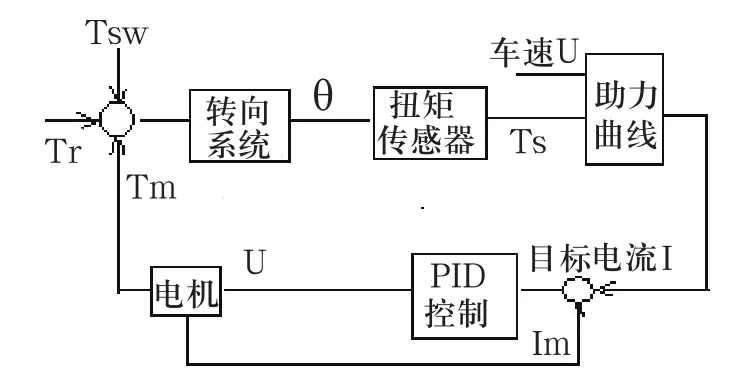
图3 电流PID控制示意图
将机电反馈模糊闭环控制作为外环,电流PID反馈控制作为内环,可以组成双闭环PID反馈控制结构,外环将转向轴扭矩信号经模糊算法处理确定电动机的目标电流I(决定电机助力力矩),可以解决EPS系统的非线性时变不确定性问题;后者时间常数小,实时性强,能快速缩小电机电枢反馈电流和目标电流的差值,故能提高系统的力跟随性能。
I = KP1Ts + Kd1 dTs/dt
Ud = Kp(I-Im)+ Kd d(I-Im)/dt
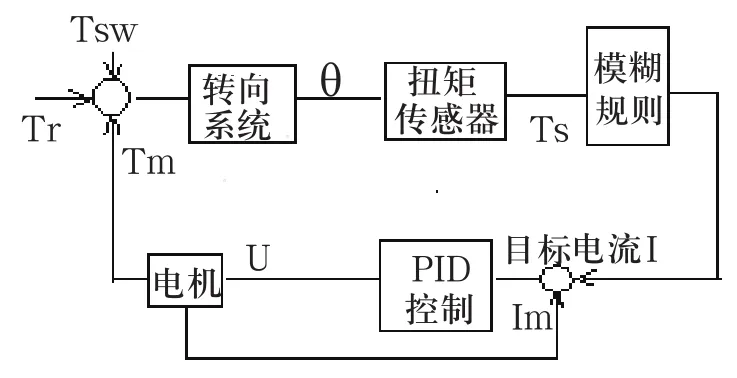
图4 双闭环PID控制示意图
与一般电机的位移、电流双闭环反馈控制结构不同,助力转向系统的角位移反馈是由机械部件传递,由转向轴上的扭矩传感器将其角位移差值反映为扭矩电信号,送到控制器进行处理。
4 仿真结果与分析
采用上述的电流PID控制、模糊PD控制和模糊PID闭环控制三种控制策略,对汽车电动助力转向系统在Matlab软件下进行仿真计算分析。仿真计算时, 其相关的参数如下:Ra=0.167Ω,La=0.00015H,Kv=0.057V /rad·s-1,Kt=0.04N·m /A, Jp=0.00018 kg·m,Bp=0.003 399N·m·s/ rad ;
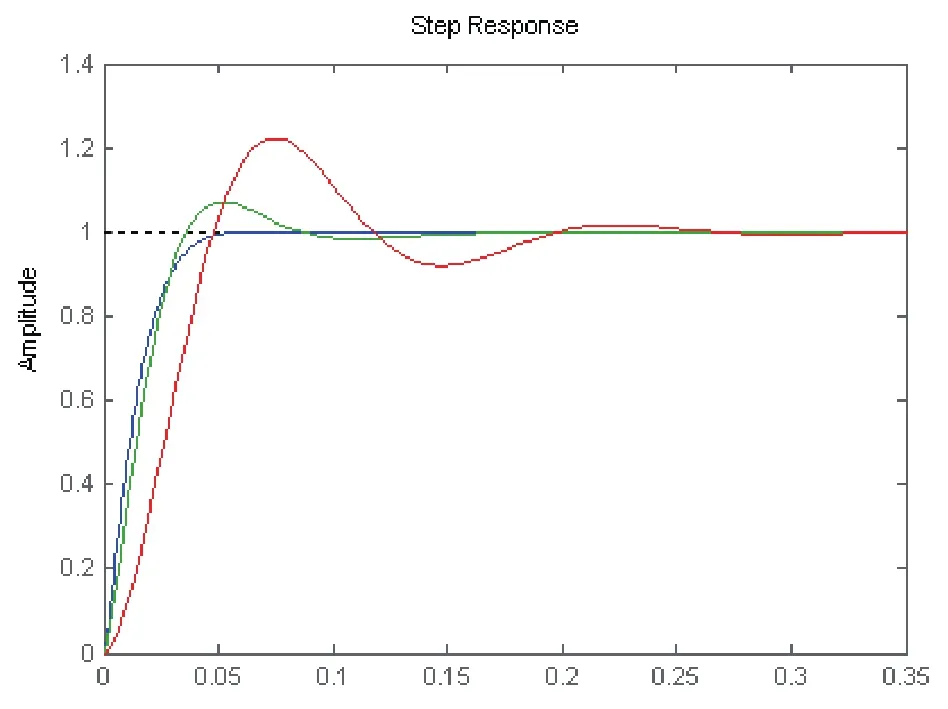
图5 三种控制策略阶跃响应比较
从图5可见,电流PID控制的调整时间约为0.3s,超调量为20%;模糊控制的调整时间约为0.12s,超调量为7%。机电双闭环PID控制的调整时间约为0.06s,超调量为接近于0。模糊PD控制优于电流PID控制,模糊PID双闭环控制又优于模糊控制,反映系统有良好的跟随性和稳定性。
5 结束语
本文提出了将力矩反馈和电机电枢电流反馈两者结合的机电双闭环PID控制策略。仿真计算的结果表明,所提出的机电双闭环PID控制策略优于常用的两种控制策略,具有更好控制效果和较好的鲁棒性,抗干扰能力也有明显的提高。
[1] Wei Wanying,Yin Guofu,Tian Daqing. Analysis On EPS Mechatronic Fuzzy-PID Closed-loop Control System [C].International Conference on Electronic Measurement &Instruments.Beijing,China.IEEE.2009,390-393.
[2] 李强,何仁.基于PI电流环电动助力转向系统的鲁棒H∞控制[J].江苏大学学报:自然科学版,2009,30(2):139-142.
[3] 张钟光.汽车EPS动力学模型分析及控制系统设计[J].青岛大学学报,2003(9):72-76.
[4] 陈无畏,王启瑞.电动助力转向系统的模糊自调整PD控制[J].江苏大学学报(自然科学版),2004(3):112-115.
TP273
A
1009-0134(2010)12(上)-0041-03
10.3969/j.issn.1009-0134.2010.12(上).14
2010-07-20
四川省科技厅重点攻关项目基金资助(03GG0082001)
魏万迎(1955 -),男,教授,博士,主要从事工业自动化及机电控制的研究工作。
